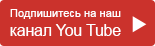



Конструкция улавливающего приспособления влияет на количество поврежденных плодов. Имеются такие улавливающие поверхности пассивного типа, при падении на которые одиночные плоды не повреждаются. Однако интенсивное опадание плодов в единицу времени (рис. 84) приводит к их соударениям на улавливающей поверхности и, следовательно, к значительным повреждениям (особенно нежных плодов).
Рис. 84. Интенсивность опадения плодов при оптимальных режимах работы вибратора:
1 — яблоки (8 сортов); 2 — сливы (10 сортов); 3 — абрикосы (2 сорта); 4 — миндаль (2 сорта); 5 — вишня и черешня (12 сортов). Здесь Q — полнота съема плодов; q — опадение плодов в единицу времени.
С целью уменьшения повреждения плодов на улавливающей поверхности во всех странах, занимающихся разработкой плодоуборочной техники, изыскиваются оптимальные конструкции таких устройств или предлагаются новые оригинальные технические решения для выполнения этой сложнейшей задачи.
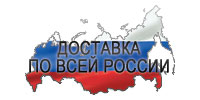
Здесь будут затронуты вопросы, которые не нашли отражения ранее, а также будут показаны основные схемы пассивных и активных поверхностей (рис. 85, а-к) улавливателей, выполненных в последнее время.
Рис 85 Некоторые типы приемных поверхностей улавливающих устройств:
I — пассивные поверхности; II — активные поверхности; а — парусина; б — парусина с амортизаторами; в — эластичная поверхность; г — эластичная поверхность с амортизаторами; д — фигурная эластичная поверхность, с амортизаторами; е — ленточный транспортер; ж — ленточный транспортер с амортизаторами; з — эластичная поверхность с вальцами; и — эластичная поверхность с вальцами и амортизаторами; к — ленточный транспортер с эластичными клиньями.
Переносимые или передвигаемые вручную улавливающие приспособления просты по устройству и дешевы. В качестве материала для улавливающей поверхности в этих приспособлениях применяют брезент, парусину, пластмассовую пленку и т. п. Недостатками их являются невозможность увеличения приемной поверхности более 25 м2 (а это значит, что их можно применять для уборки плодов с деревьев диаметром кроны до 4,5 м) из-за увеличения массы и затруднения переноса, а также невозможность приема нежных плодов без повреждений и потребность в четырех рабочих для переноса.
Навесные улавливающие устройства выполняют с пассивными приемными поверхностями в виде перевернутых зонтов, навешивают на колесные или гусеничные тракторы и самоходные шасси сзади, сбоку или спереди. Эти устройства лишены многих недостатков, свойственных переносным улавливателям. В частности, такая компоновка улавливателей позволяет довести их диаметр до 7 м и сократить до минимума обслуживающий персонал. Однако главный недостаток переносных улавливателей присущ и навесным — с их помощью нельзя принять нежные плоды без повреждений.
Основные повреждения на навесных улавливателях происходят при ударе плодов о лонжероны, которых на зонте диаметром 7 м устанавливают 10 – 16 шт, и при соударении плодов на улавливающей поверхности, так как вероятность встречи плодов на ней при вибрационной уборке оказывается значительной.
Для уменьшения повреждения плодов лонжероны покрывают эластичным материалом (поролоном, поропластом и т.п.), т.е. материалом с малым модулем упругости, а для уменьшения вероятности встречи плодов на улавливающей поверхности колебания дерева стали осуществлять отдельными толчками. Повреждения плодов несколько снизились, однако желаемых результатов получить не удалось. Кроме того, оказалось крайне сложно приклеивать эластичный материал толщиной 20 мм к лонжеронам (обычно трубам диаметром 30 – 36 мм).
В нашей стране разработаны новые улавливатели (рис.86), исключающие необходимость покрытия лонжеронов эластичным материалом и дающие возможность работать в садах со свисающими ветвями.
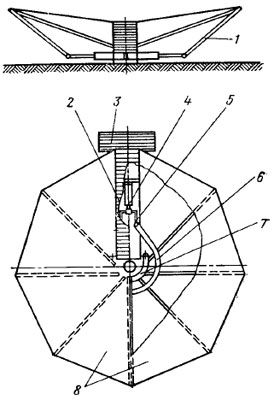
Рис. 86. Принципиальная схема улавливателя конструкции ГСКБ (г. Кишинев), Азербайджанского НИИМЭСХа и ВИСХОМа
Отличительной особенностью этих улавливателей, по сравнению со всеми подобными улавливателями, является то, что их можно подводить под дерево с низко расположенными ветвями, так как схема раскрытия этих улавливателей предусматривает два положения приемной поверхности. Первое положение обеспечивает улавливателю минимальную высоту (600 – 650 мм), при которой его подводят под дерево; второе соответствует рабочему положению. При этом положении специальным гидроцилиндром 4 через скобу 5 и кронштейны 6 и 7 достигается полное закрытие улавливающей поверхности с обеспечением наклона приемной поверхности 12 – 14 и отвода брезента 8 от лонжеронов 1, выполненных в форме буквы С. Улавливатель оснащен выносным транспортером 2 и площадкой S для установки ящиков.
Однако и новые улавливатели полностью не отвечают агротехническим требованиям по повреждаемости нежных плодов, убираемых вибрационным способом.
Прицепные и самоходные улавливатели с пассивными и активными приемными поверхностями обеспечивают увеличенный выход совершенно здоровых плодов при машинной уборке. В основном во всех странах изготовляют самоходные улавливатели.
В качестве активных приемных поверхностей во всех известных производственных машинах находят применение ленточно-планчатые транспортеры в сочетании с двумя или тремя рядами амортизирующих лент, установленных над транспортерами в шахматном порядке (в плане).
В стадии исследований находятся приемные поверхности в виде вращающихся эластичных валиков в сочетании с амортизирующими лентами над ними активные поверхности, изготовленные из эластичных клиньев и др.
Одним из оригинальных улавливателей с пассивной приемной поверхностью в сочетании с амортизирующими лентами для уборки плодов с деревьев диаметром кроны до 4,5 м является улавливатель, разработанный в Италии [30]. Улавливатель (рис. 87) состоит из двух частей, навешенных на одну раму, смонтированную на двух независимых парах ведущих колес с гидроприводом и сервоуправлением.
Основная неподвижная часть 3 улавливателя имеет длину 50 м ширину 2,45 м. Дополнительная (выдвижная) часть 2 имеет телескопическое выдвижение из основной части и состоит из двух крыльев длиной 2,3 м и шириной 2,45 и каждое Выдвижение дополнительных крыльев и их наклон осуществляется при помощи гидроцилиндров 4. Максимальный угол наклона двух половин улавливателя составляет 12° к штамбу дерева (положение 11).
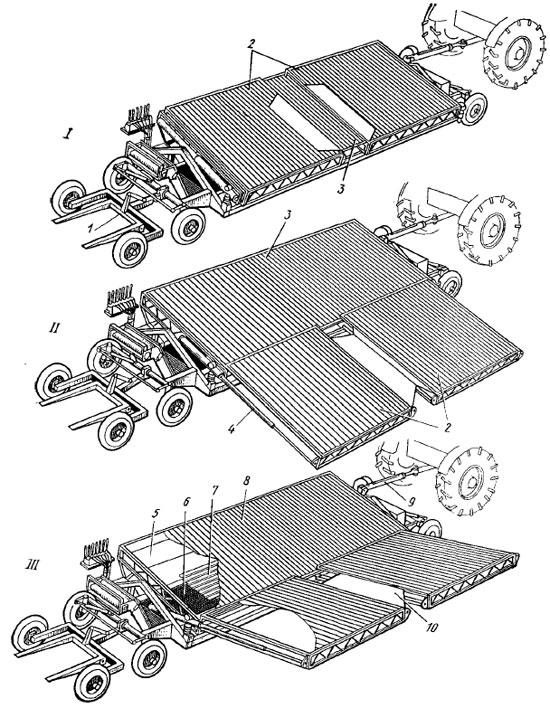
Рис. 87. Схема улавливателя с выдвижными крыльями
Улавливающая поверхность как неподвижного, так и подвижного крыльев, пассивного типа и состоит из твердой плоскости 5, покрытой пористой резиной толщиной 20 мм, на которой сверху имеется защитная пленка «Текстильтен» толщиной 1,55 мм. Над плоскостью установлен один ряд амортизирующих лент 8, изготовленных из резиновых полос шириной 60 мм и толщиной 2 мм. Расстояние между лентами 20 мм, высота от плоскости улавливателя до лент 200 мм.
Продольный транспортер 6, расположенный в центральной части основного улавливателя, также имеет один ряд амортизирующих лент 7.
Затаривание плодов осуществляется в контейнеры, установленные на специальном прицепе 1 с вилочными подхватами. Разгружаются контейнеры на землю путем опускания вилочных подхватов.
При въезде в сад и транспортировке на дальние расстояния улавливатель агрегатируют с трактором (положение I). Привод всех узлов улавливателя — гидравлический. Масляный насос приводится от ВОМ трактора через карданную передачу 9.
Максимальная длина улавливателя вместе с рулевым управлением равна 9,52 м, ширина 2,48 м, масса 1840 кг. Максимальная высота периферийных участков улавливателя равна 1,3 м, минимальная 0,26 м.
Агрегат въезжает в междурядья и благодаря независимому управлению обеих пар колес подходит вплотную к штамбу дерева (он должен иметь высоту не меньше 55 см). Оператор выдвигает подвижные крылья, одновременно наклоняя их в сторону штамба. Штамб дерева проходит между двумя эластичными козырьками 10. Таким образом, около штамба получается корытообразная приемная поверхность, наклоненная к горизонту до 12° (положение III). Колебание дерева производят автономным устройством или вибратором штамбового типа, который может быть смонтирован под неподвижной частью улавливателя. Снятые с дерева плоды попадают на амортизирующие ленты, проходят через них и скатываются по плоскости на продольный выносной транспортер, перемещающий плоды в контейнер, установленный на специальной прицепной тележке. В связи с тем что контейнер имеет определенную высоту, задняя часть выносного транспортера выполнена наклонной. После затаривания всех плодов подвижные крылья убирают и агрегат перемещается к очередному дереву, где операция повторяется.
В ВИСХОМе под руководством В. В. Князькова создана принципиально новая улавливающая поверхность в виде вращающихся эластичных лопастных валиков в сочетании с одним рядом амортизирующих лент.
Улавливатель (рис. 88) состоит из переоборудованного самоходного шасси Т-16М 1 и центрального бруса 2 с машины ПСМ-55. На центральном брусе смонтированы консольные кронштейны 4 с роликами на концах. На ролики установлена подвижная прямоугольная рама 5, выдвижение которой в сторону штамба осуществляется расположенным в центре улавливателя гидроцилиндром с ходом штока 760 мм. При этом один конец цилиндра прикреплен к брусу, другой (штоковый) — к подвижной раме улавливателя.
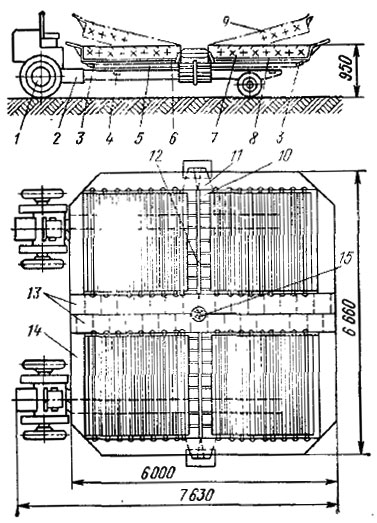
Рис. 88. Схема улавливателя с вращающимися эластичными лопастными валиками
На подвижной раме каждой половины улавливателя смонтированы две секции с вращающимися эластичными лопастными валиками 7. Лопастной валик имеет крестообразную форму. Лопасти изготовлены из листового поропласта толщиной 20 мм, длина валика 2500 мм, расстояние между центрами соседних валиков 270 мм, диаметр описанной окружности лопастей 250 мм. Основанием лопастного валика является дюралюминиевая труба диаметром 36 мм с толщиной стенки 2 мм, наружная поверхность которой покрыта поропластом толщиной 10 мм. К трубе, покрытой поропластом, клеем 88Н приклеены лопасти. В концевые части труб впрессованы стальные полуоси, расположенные в подшипниках качения. Корпуса подшипников закреплены на специальных боковинах подвижной рамы, имеющих внизу отбортовку для крепления скатной доски 8 из фанеры толщиной 8 мм, покрытой поропластом толщиной 30 мм.
Крепление секций с валиками к подвижной раме осуществлено следующим образом. Наружные стороны каждой секции соединены шарнирно со штоками двух гидроцилиндров 3 с ходом штока 250 мм, заимствованных у самоходного шасси ДСШ-16. Внутренние стороны секций также соединены шарнирно с кронштейнами 6. Подобное соединение дает возможность осуществлять наклон обеих секций одновременно в сторону выносного ленточно-планчатого траспортера 10 на угол до 20° (рис. 89). Ширина транспортера 800 мм, длина 3000 мм, шаг планок 250 мм.
Рис. 89. Общий вид правой половины улавливателя с приподнятыми секциями
На выходном конце транспортера установлен раздвоенный лоток 11 (см. рис. 88), позволяющий выгружать плоды одновременно в два ящика.
Три стороны улавливателя обрамлены щитками 14, покрытыми эластичным материалом.
На стороне улавливателя, обращенной в сторону штамба дерева, имеется уплотнительное устройство 13, предназначенное для уплотнения половин улавливателя при стыковке во время работы.
Управление пидроцилиндрами подъема секций и выдвижения рамы осуществляется от гидросистемы самоходного шасси. Валики приводятся во вращение от гидродвигателя МГ-152 (nтах = 2100 об/мин) через червячный редуктор, u = 9. Масло в гидродвигатель также подается из гидросистемы шасси. Ленточный транспортер приводится в действие от ВОМ шасси через редуктор, u = 4.
Работа улавливателя заключается в следующем. Каждая половина, двигаясь по соседним междурядьям, останавливается трактористом у дерева таким образом, чтобы центр штамба 15 совпадал с центром выносного транспортера. Затем с помощью гидроцилиндров выдвигают рамы в сторону штамба дерева до соприкосновения уплотнителей. Одновременно к дереву подъезжает встряхиватель с серийной машиной ВСО-25 «Стрела» и захватывает ветвь. Далее включаются в работу валики и транспортер на улавливателе и вибратор.
Опадающие с дерева плоды поступают одновременно на амортизирующие ленты 9 и на эластичные лопасти вращающихся валиков. За счет контакта с эластичными элементами скорость плодов значительно снижается и они поступают на скатную поверхность. По скатной поверхности плоды, подталкиваемые лопастями валиков, перемещаются отдельными порциями, не соприкасаясь между собой, и попадают на выносной транспортер.
В случае необходимости ускоренной и безусловной подачи всех плодов на выносной транспортер наружные секции могут быть подняты, что обеспечит дополнительные условия скатывания плодов, оставшихся вдали от транспортера. Учитывая, что плоды с разных секций скатываются навстречу друг другу, на выносном транспортере установлен ограничительный пояс 12 из поропласта, делящий транспортер на две половины и предупреждающий соударение плодов. С выносного транспортера плоды разгружаются в ящики, установленные на земле или на специальной подставке. Затем операции отъезда от дерева и подъезда к очередному дереву повторяются в той же последовательности.
В США проведены исследования активной приемной поверхности для уборки спелых персиков. В качестве поверхности для приема плодов использовались мягкие пенопластовые клинья и пирамиды, прикрепленные под углом 90° к ленте транспортера. При движении транспортера на клинья и пирамиды сбрасывали в лабораторных условиях модель персика из пластика массой 212 г. Определяли силу удара и отскок (рикошет) плода от поверхности клиньев и пирамид.
Дальнейшим этапом работы было создание двух прицепных полевых установок с размером приемной поверхности из клиньев 2,4X0,6 м при высоте клиньев 203 мм и основании 50,8X50,8 мм. С их помощью убирали персики пяти сортов. Установлено, что на этой улавливающей поверхности даже зрелые персики практически не повреждаются при падении с высоты до 2,4 м (при осмотре через 24 ч после уборки).
Последними техническими решениями при создании улавливающих устройств является разработка ряда конструкций многоярусных улавливателей, а также улавливателей, заполняющих промежутки между ветвями дерева пластмассовыми шариками, пальцами (стержнями), надуваемыми воздухом. Рассмотрим некоторые наиболее интересные улавливатели подобного типа.
Исследователи И. Мельшау, Р. Фридли и Л. Клейпул (США) провели экспериментальную работу по уменьшению повреждения яблок и груш о ветви плодовых деревьев путем обвязки ветвей мягким материалом, заполнением промежутков между ветвями мягким материалом, направлением падения фруктов по кратчайшему пути вниз при минимально возможных ударах их о ветви.
В первом случае на скелетные ветви наносили с помощью напыления полиуретановый пенопласт, при этом повреждения плодов в кроне дерева резко сократились, однако такой способ понижения повреждаемости плодов не заслуживает серьезного внимания по техническим и экономическим причинам.
Заполнение промежутка между ветвями выполнялось двумя способами. Первый способ заключается в обвертывании дерева со всех сторон большим брезентовым мешком, последующем заполнении мешка пластиковыми шариками диаметром 75 мм и колебании дерева при помощи штангового устройства. Находящиеся в мешке шарики снижают количество поврежденных плодов, но одновременно мешают отрыву плодов (отрывается 40 – 50% плодов от ветвей).
Второй способ заключается в том, что промежутки между ветвями заполняются пальцами (зубьями, стержнями), надуваемыми воздухом под давлением 0,2 – 0,35 кгс/см2. При этом, наклоняя пальцы к периферии кроны, можно выносить плоды, снятые с дерева за счет его колебания механическим способом.
Определенный интерес представляет собой макет машины, разработанный, построенный и испытанный в Дании Ове Расмуссеном.
Принцип действия машины (рис. 91) заключается в том, что опадающие при колебании дерева плоды окружаются пластмассовыми шариками. Машина портальная, что позволяет проходить машине над деревом и заключать его в закрытый ящик, образованный из прозрачных стенок машины, дна со специальными продольными транспортерами 8 и резиновыми уплотнителями 9 деревьев, крышки 10, выполненной в виде бункера с открывающимся днищем, и двери 7 с уплотнительными элементами. В бункере размещается несколько кубических метров легких пластмассовых шариков 1 размером с теннисный шарик. При открывании днища крышки шарики опускаются вниз и обволакивают все дерево. Затем днище закрывается, дереву сообщают колебания и плоды, оторвавшиеся от ветвей, между пластмассовыми шариками мягко опускаются вниз. После этого днище бункера вновь открывается и большая часть пластмассовых шариков с помощью воздушного потока, создаваемого вентилятором 5, через левый раструб 6 поступает в бункер. Плоды же и часть оставшихся в ящике шариков продольными транспортерами 8, через узкую щель подаются на поперечный транспортер 4 и далее погрузочным транспортером 2 в контейнер 3. В момент падения пластмассовых шариков с продольных транспортеров на поперечный транспортер 4 происходит окончательное засасывание всех остальных шариков через правый раструб и подача их в бункер машины.
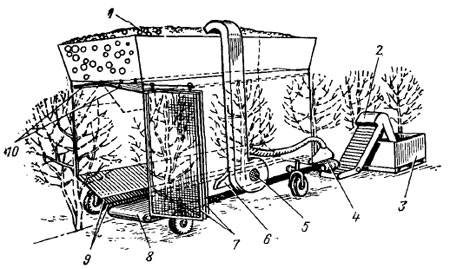
Рис. 91. Схема машины конструкции Расмуссена (Дания) для уборки плодов в пальметтных садах
Преимуществом машины Расмуссена является возможность уборки нежных плодов без повреждений. Однако ее широкое применение возможно только при комплексном решении ряда агрономических (специальное формирование небольших по размеру деревьев и др.) и инженерных задач, связанных главным образом с созданием вакуумной камеры для деревьев.
Для устранения повреждения плодов о ветви Корнельским университетом в США разработана оригинальная конструкция многоярусного улавливателя. Улавливатель имеет два яруса, которые при уборке плодов внедряются в крону дерева. Приемная поверхность обоих ярусов состоит из надувных элементов длиной 2,4 м каждый, позволяющих мягко принимать плоды при падении. В улавливателе предусмотрен безударный спуск плодов, специальные подаватели плодов с обоих ярусов на общее укладочное устройство с эластичными рабочими органами и автоматическим устройством, обеспечивающим строго рядовую укладку плодов в контейнер.
Механизмы улавливателя смонтированы на самоходном шасси со всеми ведущими и управляемыми колесами и шарнирно сочлененной рамой с гидроуправлением. Улавливатель перемещается по междурядью, а затем, после поворота колес на 90°, сближается с обрабатываемым деревом. Все механизмы и колеса приводятся от индивидуальных гидродвигателей, связанных с единым насосом подачей 265 л/мин. Насос приводят в действие от автомобильного двигателя внутреннего сгорания. Масса машины 7000 кг, габаритные размеры: длина 9760, ширина 3360, высота 2800 мм.
Испытания улавливателя показали, что время обработки одного дерева составляет около 2 мин, поврежденных плодов о ветви — значительно меньше, чем при использовании традиционных улавливающих поверхностей, устанавливаемых под деревом.
Как видно из поперечного разреза надувного элемента улавливателя (рис. 92), он состоит из основания 1, изготовленного из жесткой полихлорвиниловой трубки диаметром 31,75 мм, большого 2 и малого 3 надувных элементов. К основанию приварены большие баллоны диаметром 127 мм из полиуретановой пленки толщиной 0,18 мм, к которым в свою очередь приварены малые баллоны диаметрам 76,2 мм из такого же материала. Через отверстия диаметром 9,5 мм из основания нагнетается воздух в баллоны под давлением 152 мм рт. ст., в результате чего элемент принимает форму желоба шириной 122 мм, по которому плоды скатываются в боковой спуск. Для облегчения проникновения в крону дерева полихлорвиниловая трубка (основание надувного элемента) оснащена металлическим наконечником с деревянным обтекателем.
Надувные элементы расположены в два яруса. Верхний содержит 14 элементов, нижний 15. Расстояние между ярусами 1070 мм. Каждый ярус и надувные элементы наклонены на 12° от штамба дерева в сторону междурядья. В самом низу под кроной дерева расположен еще один ярус улавливателя, состоящий из полимерных трубок и расположенных над ними амортизирующих лент.
Каждый ярус имеет свой приемник плодов, изготовленный из гофрированных стеклопластиковых панелей с уклоном для окатывания плодов в спуск.
Безударный спуск плодов с двух верхних ярусов осуществляется с помощью специального механизма (по терминологии специалистов США «граббера»). Его принцип действия основан на переменном торможении и опускании плодов.
Из схемы механизма для безударного спуска (рис. 93) видно, что он предназначен для одновременного приема плодов с двух верхних ярусов и состоит из двух неподвижных фанерных панелей 5 и 9 и одной подвижной панели 5, покрытых внутри эластичным материалом 8. При этом нижний зазор между панелями несколько меньше верхнего.
Плоды окатываются с надувных элементов улавливателя на направители 1 и 4 из полиуретана и поступают в межпанельное пространство. При этом плоды верхнего яруса проходят желоб, в котором установлены клиновые дефлекторы 2. Затем, если размер плода невелик, плод проходит через зазор между эластичными материалами панелей. Обычно этого не бывает, так как зазор между эластичными материалами устанавливается меньше среднего размера убираемых плодов.
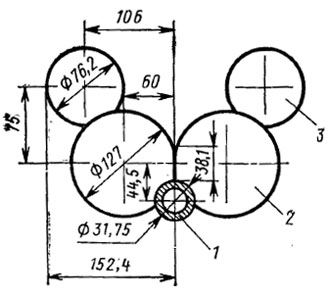
Рис. 92. Поперечный разрез надувного элемента
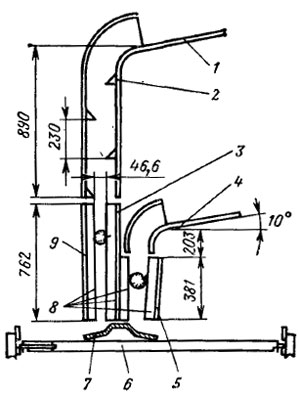
Рис. 93. Схема механизма для безударного спуска плодов
Одновременно с началом поступления плодов в межпанельное пространство включается в работу кривошипно-шатунный механизм, приводящий в возвратно-поступательное движение среднюю панель. В процессе колебаний панели расстояние между эластичными материалами изменяется и плоды постепенно проваливаются вниз до выхода из панели на нижний пластинчатый дефлектор 7, с которого они поступают иа главный транспортер 6, куда с помощью специального устройства (подавателя) подаются также плоды с нижнего яруса. Улавливатель оснащен четырьмя спусками шириной по 915 мм каждый. Изменяя частоту и амплитуду колебаний подвижной панели, можно изменять скорость продвижения плодов по спуску.
Подаватель плодов с нижнего яруса (рис. 94) состоит из транспортера 2 с мягкими роликами, пенополиуретановых вальцов 1, дефлектора 5 и пенополиуретановых накладок 4.
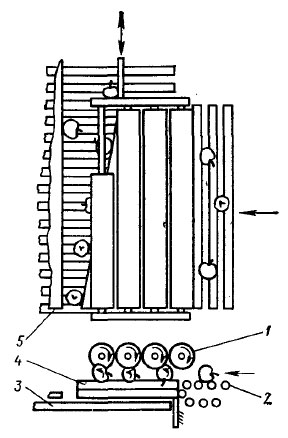
Рис. 94. Схема подавателя плодов с нижнего яруса
Плоды с роликового транспортера 2 поступают на пенополиуретанавые накладки 4 толщиной 38 мм и перекатываются по ним под действием вальцов 1 диаметром 114 мм, изготовленных из того же эластичного материала. Далее плоды поступают на полотно главного транспортера 3 шириной 1016 мм. Полотно главного транспортера состоит из пары бесконечных втулочно-роликовых цепей, покрытых пенополиуретаном толщиной 12 мм.
Главный транспортер выгружает плоды в специальное укладочное устройство — наполнитель контейнера (рис. 95), в котором плоды укладываются послойно, правильными рядами. Устройство состоит из главного транспортера 5, гребенчатого направителя 4, микровыключателя 3, подающего барабана 2, спуска 1, нижнего амортизатора-направителя 6, механизма 7 подачи и перемещения контейнера влево, концевого микровыключателя 8, соединительного звена 9 и механизма 10 возврата контейнера вправо.
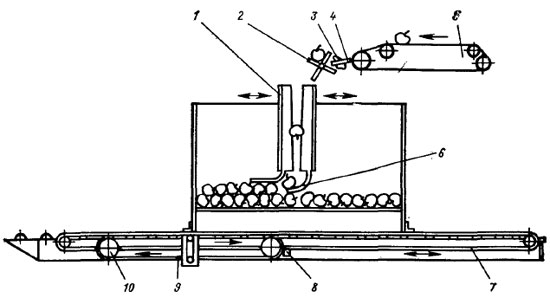
Рис. 95. Схема укладочного устройства (наполнителя контейнера)
Сплошной ряд плодов накапливается в четырехлопастном подающем барабане 2, вдоль которого расположены в ряд датчики заполнения в виде нескольких микровыключателей 3 с последовательным соединением. При заполнении всех мест в барабане микровыключатели замыкают цепь, благодаря чему включается электромагнитная муфта привода, поворачивая барабан на четверть оборота. В момент поворота барабана плоды поступают в спуск 1, устройство которого аналогично описанному с той лишь разницей, что колебательное движение получают обе панели спуска.
У нижнего конца спуска находится амортизатор-направитель 6, осуществляющий правильную укладку плодов в ряд, примыкающий к ранее уложенному. Поступлению каждого ряда плодов соответствует синхронное перемещение контейнера влево, осуществляемое с помощью специального механизма 7. После укладки одного слоя контейнер возвращается назад при помощи механизма 10 с концевым микровыключателем 3.
Одновременно с включением реверсивного хода контейнера включается гидромеханизм, слушающий контейнер вниз на высоту одного слоя плодов. Включение транспортера для выгода заполненного контейнера и установки вместо него порожнего осуществляется вручную.





