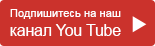




В нашей стране с 1970 г. изготовляется плодоуборочная машина ВСО-25 «Стрела». Здесь лишь приведена ее схема (рис. 57) и изложены предложения по усовершенствованию, направленные на улучшение технологического процесса и качества работы машины.
Машина ВСО-25 «Стрела» с улавливающим приспособлением УП-5 состоит из рамы 4, вибратора 3, стрелы 5, механизма 2 подъема и опускания стрелы, захвата 6, механизма 1 поворота захвата вокруг своей оси и улавливающего приспособления 7.
Рис. 57. Схема плодоуборочной машины ВСО-25 «Стрела» с улавливающим приспособлением УП-5
С помощью машины ВСО-25 можно убирать сливы, черешни, вишни, абрикосы, миндаль и орехи, идущие как на длительное хранение, так и на техническую переработку, с деревьев высотой 5 – 6 м и диаметром кроны до 4,5 м, а также яблоки, идущие на немедленную техническую переработку. Привод рабочих органов машины осуществлялся от вала отбора мощности трактора ДТ-20 садовой модификации с удлиненной базой, на навесную систему которого она навешивается. Машина работает в сочетании с улавливающим приспособлением УП-5, переносимым вручную от дерева к дереву. Общая масса машины 468 кг, длина стрелы 3,5 м, максимальная высота подъема центра захвата до 3,5 м.
Одним из недостатков машины ВСО-25 «Стрела» является наличие в ее составе переносимого вручную улавливающего приспособления. Для устранения этого недостатка специалистами ГСКБ по машинам для садов и виноградников (г. Кишинев) предложена усовершенствованная конструкция машины.
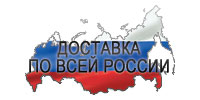
На рис. 58 показана схема усовершенствованной плодоуборочной машины ВСО-25 «Стрела». На раму 1 вибратора с помощью кронштейнов 6 с шарнирами 7 установлены два приводных валика 8, к которым прикреплены полотнища 2, имеющие на противоположном oт валиков конце специальные накопители 3 и штыри 4.
Рис. 58. Схема усовершенствованной плодоуборочной машины ВСО-25 «Стрела»
При подъезде машины к дереву, подлежащему обработке, тракторист выводит валики из фиксированного положения. Двое рабочих разматывают полотнища с валиков, имеющих муфту свободного хода, и закрепляют их, втыкая штыри в почву. Одновременно тракторист осуществляет захват ствола дерева и включает вибратор. Плоды падают на полотнища. Затем тракторист включает механизм 5 привода валиков, которые наматывают на себя полотнища. При этом плоды по наклонной поверхности направляются к концу полотнищ в накопители, оборудованные специальным карманом. Рабочие открывают карманы и плоды высыпаются в заранее подготовленную тару. Установив полотнища в транспортное положение, тракторист переезжает к очередному дереву и весь процесс съема плодов повторяется.
С целью исключения повреждения коры деревьев в месте обхвата специалисты того же ГСКБ предложили модернизированное захватное устройство.
Модернизированный захват (рис. 59) имеет трубу 11, на торце которой закреплена неподвижная подушка 13 с кронштейном 6, к которому при помощи пальца 7 шарнирно прикреплен рог 4, состоящий из двух пластин, жестко соединенных между собой. На конце рога шарнирно установлены на оси 1 ролики 2. На наружной поверхности роликов помещена эластичная лента 3, один конец которой шарнирно через ось 14 соединен с неподвижной подушкой, а другой через компенсирующую пружину — с тросиком 5. Свободный конец тросика прикреплен к тяге 8, которая при помощи пальцев 7 соединена с рогом и ползуном 12. Натяжение тросика регулируется винтом 9 с шайбой. Ползун соединен со штангой 10, взаимодействующей с гидроцилиндром машины. Для обеспечения свободного прохождения штамбов дерева на эластичную ленту накинута петля 15, шарнирно соединенная с пальцем рога.
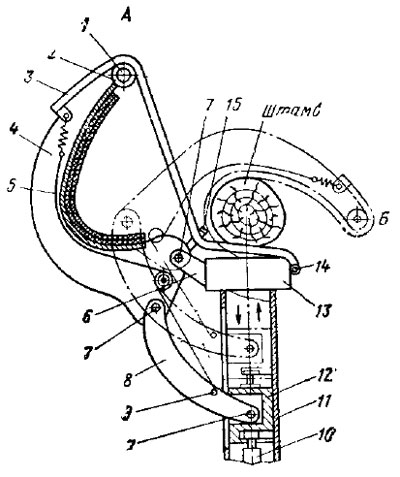
Рис. 59. Схема модернизированного захвата машины ВСО-25 «Стрела»
Захват работает следующим образом. В открытом положении (положение А) его подводят к штамбу дерева (скелетной ветви) до упора эластичной ленты в неподвижную подушку. В это время петля находится в натянутом состоянии и удерживает эластичную ленту, обеспечивая тем самым свободное прохождение штамба дерева до упора в неподвижную подушку. Затем оператор включает гидроцилиндр, который приводит в Движение штангу с ползуном, при этом тяга осуществляет перемещение рога и освобождает (в зависимости от хода цилиндра) тросик с эластичной лентой, которая, перекатываясь по наружной поверхности роликов, обхватывает штамб до полного зажима рогом (положение Б). Далее в работу включается вибратор. После колебания дерева гидроцилиндр перемещает штангу с ползуном и тягу вниз.
Тяга через тросик возвращает рог с эластичной лентой в исходное положение. Затем процесс повторяется.
Усовершенствованная машина ВСО-25 прошла широкие хозяйственные испытания и показала вполне удовлетворительные результаты — уменьшено количество обслуживающего персонала с 7 до 3 человек, практически исключены повреждения деревьев в месте обхвата.
Специалисты Азербайджанского НИИМЭСХ Р. М. Мамедов и А. А. Алиев предложили лоток новой конструкции для машины ВСО-25 «Стрела».
Лоток новой конструкции (рис. 60, б), в отличие от существующего (рис. 60, а), состоит из двух скрытых под плоскостью улавливателя поддонов, которые изолированы друг от друга брезентовой перегородкой, играющей роль одновременно и гасителя скорости опадающих плодов.
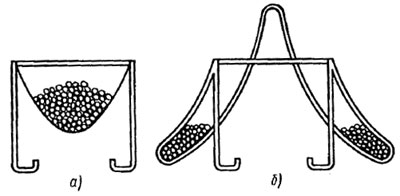
Рис. 60. Лотки для улавливания плодов к машине ВСО-25
Сравнительный анализ работы улавливающего приспособления с новым и старым лотками показал, что применение новых лотков уменьшает выход нестандартных яблок (почти в 1,6 раза) и улучшает товарное качество стандартных плодов.
В Венгрии в серийном производстве находится плодоуборочная машина, состоящая из двух основных частей: турельного стряхивателя ТФХ и переносимого вручную улавливающего приспособления КГЕ. Машина предназначена для уборки сливы, вишни, черешни, абрикосов и миндаля с небольших деревьев (диаметр кроны не более 4,5 м).
Турельный стряхиватель (рис. 61) агрегатируют с трактором класса 0,6 тс. Корпус 3 стряхивателя прикреплен к наклонной траверсе 11 длиной 750 мм, которая соединена с упорным подшипником 10, установленным на вертикальной стойке 15. Благодаря такой установке стряхиватель имеет возможность поворачиваться в горизонтальной плоскости более чем на 270°. Стопорят траверсу штырем.
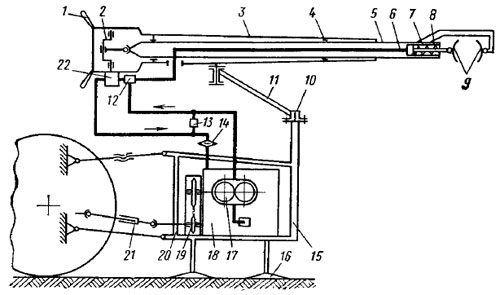
Рис. 61. Схема турельного стряхивателя ТФХ венгерской плодоуборочной машины
Вертикальная стойка является одной из несущих балок рамы 20, смонтированной на трехточечной навесной системе трактора. На раме установлен масляный бак 18 вместимостью 35 л., масляный насос 17 и цепная передача 19, предназначенная для повышения частоты вращения насоса, приводимого в движение от вала отбора мощности трактора через карданную передачу 21.
Во время работы вибратора раму при помощи гидравлической системы трактора опускают и устанавливают на землю на специальные нижние упоры 16.
Цельнометаллический корпус 3 стряхивателя выполнен из круглых труб переменного сечения (108 мм у основания и 48 мм у конца захвата). Общая длина стряхивателя около 6500 мм. У управляемого конца стряхивателя расположен прямоугольный корпус, сваренный из листовой стали, в котором размещен кривошипно-шатунный механизм 2. Шатун шарнирно соединен с внутренним вибрирующим полым штоком 5, на другом конце которого закреплен захват. Кривошипно-шатунный механизм приводится в движение от гидродвигателя 22. Вибрирующий шток 5 установлен в корпусе стрелы на подшипниках скольжения 4.
Захватное приспособление состоит из гидравлического цилиндра 7 одностороннего действия, внутри которого расположена пружина 8. Захват — струбцинного типа с осевым зажатием ветви. Рабочая (внутренняя) поверхность зажимов 9 покрыта двумя слоями войлочных прокладок, толщиной 10 и 15 мм. Захват может зажимать ветви диаметром 60 – 150 мм.
Стряхивателем управляет оператор при помощи рукояток 1, прикрепленных к корпусу вибратора. Привод стряхивателя гидравлический, осуществляется от автономной гидросистемы. Давление масла создается шестеренным насосом 17. Масло от насоса по маслопроводу 6 через клапан давления 12 поступает в цилиндр 7 механизма захвата. После зажатия ветви в клапане создается определенное давление, в результате чего клапан срабатывает и масло поступает в гидродвигатель привода кривошипно-шатунного механизма. Благодаря подобной блокировке колебание дерева начинается только после зажатия ветви. Возвращение подвижной части захвата в исходное положение происходит под действием пружины 8, расположенной внутри цилиндра. Масло по сливной магистрали сливается в бак через масляный фильтр 14. Сливная и нагнетательная магистрали соединены между собой предохранительным клапаном 13, регулированием которого достигается необходимая частота колебаний и сила зажатия ветвей.
Улавливающее приспособление состоит из двух симметрично-расположенных половин. Каждая половина представляет собой трубчатый каркас с растяжками, на который натягивают полотно при помощи шнуров. Каждая половина имеет по два выгрузных отверстия, под которыми устанавливают ящики. Расстояние между землей и нижней частью улавливателя выдерживается специальными опорами. Во время работы каждую половину переносят двое рабочих за ручки. Для перевозки на дальние расстояния каждая половина улавливателя может складываться.
Техническая характеристика венгерской плодоуборочной машины приведена в табл. 6.
Машины с переносными улавливающими приспособлениями требуют относительно большого количества обслуживающего персонала (5 – 7 человек) и работа на них довольно утомительна. В связи с этим следующим шагом в развитии вибрационных плодоуборочных машин явилось создание машин с прицепными или навесными на трактор улавливающими приспособлениями. В мировой практике имеется много таких машин. Рассмотрим лишь наиболее типичные машины, предназначенные для уборки различных плодов.
В 1976 г. прошла государственные испытания и рекомендована к выпуску опытной партией машина МПУ-1, созданная Горским сельскохозяйственным институтом (г. Орджоникидзе) совместно с ГСКБ по машинам для садов и виноградников (г. Кишинев).
Машина МПУ-1 (рис. 62) предназначена для уборки косточковых и семечковых плодов с деревьев, диаметр кроны которых не превышает 6 м, в садах с шириной междурядий более 5 м. Плоды, убранные машиной, пригодны для реализации в свежем виде и для технической переработки.
Рис. 62. Машина МПУ-1
Машина МПУ-1 (рис. 63) — самоходная, смонтирована на базе самоходного шасси Т-16М, от которого заимствована энергетическая установка (двигатель) 1, трансмиссия, гидроцилиндры и ведомые колеса. Ведущие колеса заимствованы от трактора МТЗ-52.
Рама 11 машины соединена с трансмиссией и передним мостом 4 при помощи параллелограммных механизмов 2, что позволяет изменять дорожный просвет и угол наклона улавливателя в продольном направлении до 4°.
В машину входят улавливатель 9 с растяжками 6, под левым крылом которого расположен продольный выгрузной транспортер 8 с вентилятором 7 для очистки плодов от легковесных примесей (листьев, веточек, пыли и т. п.) и инерционный штамбовый вибратор 5. Машина оборудована устройством для колебания ветвей в виде тросового стряхивателя 3 и уплотнителем 10 штамбов деревьев.
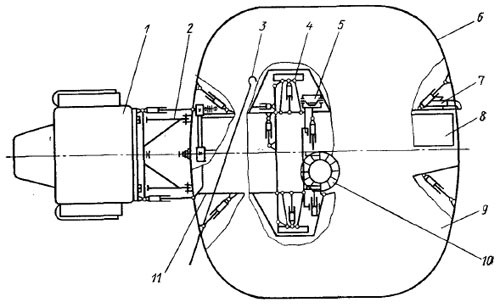
Рис. 63. Схема машины МПУ-1
Передний мост (рис. 64) имеет независимую рычажно-гидравлическую подвеску. Рама 5 машины связана с управляемыми колесами 1 нижними 2 и верхними 4 рычагами (вилками), между которыми проходит рулевая тяга 3. На раме смонтированы улавливающая поверхность 8 и транспортер 6. Верхние и нижние рычаги соединены с рамой и колесами с помощью резинометаллических шарниров. Гидравлические цилиндры 7 двустороннего действия предназначены для изменения дорожного просвета машины; они соединены с нижними рычагами и рамой машины.
Улавливающая поверхность общей площадью 32 м2 состоит из двух секций: подвижной и неподвижной. Наклон полотна улавливателя к горизонту может регулироваться в пределах 7 – 22°. В рабочем положении полотна натягиваются специальными растяжками 6 (см. рис. 63). Подъезд машины к дереву в момент подвода зажимов вибратора к штамбу дерева осуществляется с открытой подвижной секцией улавливателя.
Продольный выгрузной транспортер выполнен ленточным с рабочей длиной 5750 мм и шириной 400 мм. Скорость движения ленты 0,71 м/с. Верхняя и нижние ленты транспортера опираются на поддерживающие ролики.
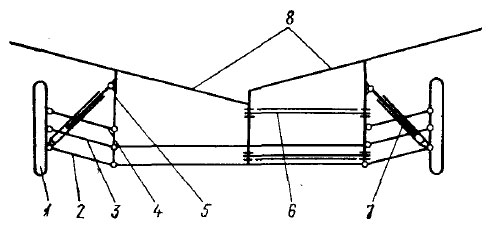
Рис. 64. Передний мост машины МПУ-1
Инерционный штамбовый вибратор (рис. 65) имеет основной корпус, перемещающийся в роликовых опорах 7, установленных на раме машины. Внутри корпуса на специальных шаровых соединениях 5 установлены гидроцилиндры 3 захвата, на штоках которых шарнирно закреплены подушки 4 захвата. Гидроцилиндры захвата соединены между собой скобой 6. К основному корпусу для колебания деревьев прикреплен корпус 8 вибратора, внутри которого расположены коленчатый вал 1 и шатун 2, соединенный шарнирно с гидроцилиндром 3.
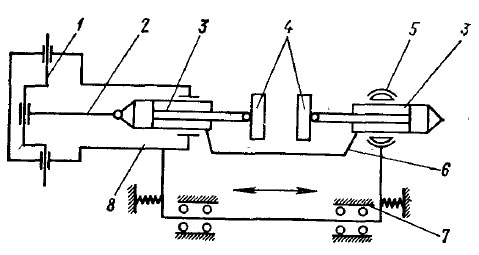
Рис. 65. Схема инерционного штамбового вибратора
Привод коленчатого вала вибратора осуществляется от ВОМ шасси через короткую карданную передачу, клиноременную передачу, муфту включения вибратора и телескопическую карданную передачу.
Устройство для колебания ветвей в виде тросового стряхивателя состоит из эксцентрикового вибратора, качающегося в вертикальной плоскости рычага, механизма натяжения (разматывания) троса, шеста и троса с крюком на конце, предназначенным для захвата ветви. Механизм для натяжения (разматывания) троса состоит из реверсивной муфты и барабана.
Технологический процесс, выполняемый машиной МПУ-1 при уборке плодов, заключается в следующем: тракторист направляет машину в транспортном положении в междурядье сада. Машина подъезжает к дереву с открытой секцией улавливателя таким образом, чтобы штамб дерева был между секциями улавливателя и по центру подушек захвата. После подъезда к дереву улавливатель устанавливают на необходимую высоту и закрывают секцию. В это же время зажимают штамб и разводят полотна улавливающего устройства под кроной дерева. Затем тракторист включает в работу вибратор, выгрузной транспортер и вентилятор.
При колебании дерева плоды падают на полотна улавливателя, скатываются на выгрузной транспортер, которым направляются в тару (ящики). В момент падения вороха с ленты транспортера он продувается воздушной струей от вентилятора, в результате чего плоды очищаются от легковесных примесей. Заполненные плодами ящики рабочий снимает с площадки под транспортером, оставляет их в междурядьях сада, а на их место устанавливает порожние. Далее тракторист выключает привод вибратора, транспортера и вентилятора, открывает зажимы захвата, складывает улавливатель, раскрывает подвижную секцию захвата, отъезжает от дерева и операции технологического лроцесса по съему плодов с дерева повторяются.
Техническая характеристика машины МПУ-1 приведена в табл. 6.
На машине предусмотрен тросовый стряхиватель, масса которого равна 50 кг. Для очистки плодов от легких примесей применен воздушный поток, создаваемый вентилятором Ц-4-70-2 и расходом воздуха 610 м3/ч.
При испытаниях машины МПУ-1 установлено, что она имеет хорошие агротехнические показатели на уборке слив и яблок. Полнота съема плодов колеблется в пределах 95 – 97%, полнота улавливания снятых плодов составляет 96 – 97%, плоды без механических повреждений находятся в пределах 94 – 95%, при этом плоды без плодоножек при уборке слив составляют 27%, при уборке яблок 57%. Засоренность плодов легковесными примесями не превышает 2,9%.
В садах, не приспособленных к механизированной уборке, повреждения составляют около 10% штамбов плодовых деревьев, что несколько превышает предел повреждаемости по агротехническим требованиям.
Машина КБП-1 (рис. 66) предназначена для уборки плодов,, идущих на техническую переработку, с деревьев, имеющих диаметр кроны до 6 м. Машина — прицепная, агрегатируется с-трактором МТЗ всех марок и трактором Т-54В.
Основными узлами машины (рис. 67, а, б) являются полуприцеп 18, встряхиватель 7 турельного типа и улавливатель-зонтообразного типа.
Полуприцеп 18 — одноосный с колесами 14, соединяется с трактором при помощи серьги, жестко прикрепленной к раме полуприцепа.
Рис. 66. Плодоуборочная машина КБП-1
Поперек полуприцепа установлены направляющие 17, по которым на роликах перемещается тележка 19 с консолью 13, приводимая в движение гидроцилиндром 20. На консоли 13 шарнирно закреплена вилка 23, на которой установлена площадка с сиденьем для оператора. К этой же вилке с противоположной стороны шарнирно прикреплена рама 27 улавливателя. Зубчатым сектором 21, шарнирно установленным на консоли 13 и приводимым в движение спаренными гидроцилиндрами 4 через шестерню 22, жестко сидящую на вилке, осуществляется поворот верхней части улавливателя на 180 – 230°.
В передней части на площадке полуприцепа установлены, два масляных бака, а на специальных кронштейнах два гидронасоса 3 для привода механизмов вибратора и улавливателя. Привод гидронасосов осуществляется от ВОМ трактора через, карданную передачу 1 и цепные передачи 2.
На полуприцепе смонтированы вилочные подхваты 15, на которые устанавливается контейнер для плодов. Подъем и опускание вилочных подхватов осуществляется гидроцилиндром 16.
Улавливатель состоит из приемной поверхности 24 зонтообразного типа, транспортера 28 и вентилятора 12. Привод транспортера и вентилятора гидравлический от гидромоторов.
Приемная поверхность раскрывается при помощи пары зубчатых колес 26 с рейками 25, приводимыми в движение гидроцилиндрами 8 двустороннего действия. Для покачивания приемной поверхности с целью обеспечения хорошего скатывания плодов на транспортер установлены два гидроцилиндра 9.
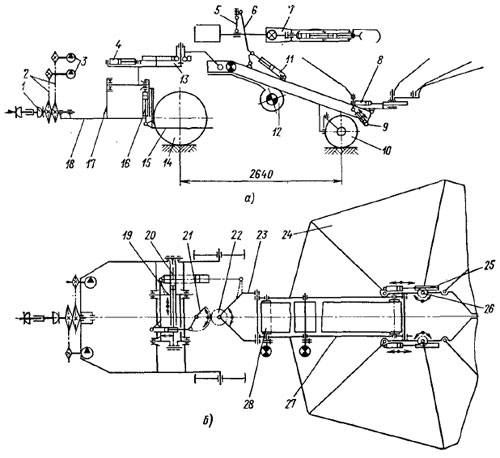
Рис. 67. Общая схема плодоуборочной машины КБП-1: а — вид сбоку; б — вид в плане
Для лучшего копирования микрорельефа почвы рама улавливателя снабжена двумя самоустанавливающимися ходовыми колесами 10.
Устройство для колебания ветвей (встряхиватель 7) расположено в специальной люльке с гидроцилиндром 5, установленной в параллелограммном механизме 6, шарнирно закрепленном на раме улавливателя. Привод параллелограммного механизма осуществляется двумя гидроцилиндрами 11 двустороннего действия. Гидроцилиндр 5 люльки обеспечивает перемещение встряхивателя 7 в вертикальном направлении.
Машина КБП-1 имеет две автономные гидравлические системы: одну — для привода механизмов улавливателя, другую — для привода механизмов встряхивателя.
Гидравлическая система улавливателя (рис. 68) питается от насоса 2, который с помощью трубопроводов связан с делителем 1 потока масла, выделяющим для этой гидросистемы 15 л/мин масла из общего расхода и направляющим его на вход пятисекционного распределителя 5. Остальная часть масла направляется на вход двухсекционного распределителя 15.
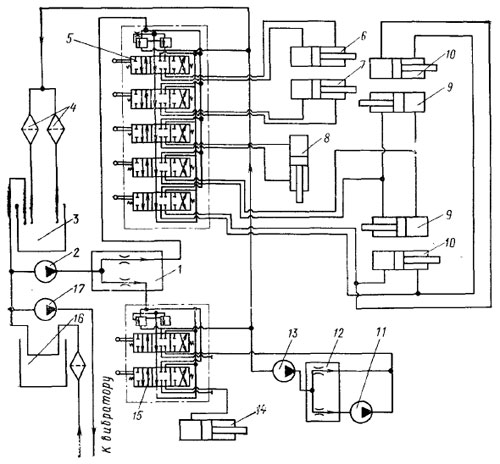
Рис. 68. Схема гидравлической системы улавливателя машины КБП-1
От распределителя 5 масло подается к гидроцилиндрам 6 – 10 для подъема и опускания вилочных подхватов (гидроцилиндр 8), поперечного перемещения улавливателя (гидроцилиндр 6), поворота улавливателя (гидроцилиндр 7), покачивания приемной поверхности улавливателя (гидроцилиндр 9), развертывания и свертывания приемной поверхности улавливателя (гидроцилиндр 10).
Одна секция распределителя 15 связана с гидромоторами 11 и 13 для привода вентилятора и транспортера. Из гидромотора 13 масло через делитель потока 12 подается на вход гидромотора 11. Другая секция распределителя 15 связана с гидроцилиндром 14, обеспечивающим вертикальное перемещение встряхивателя.
Гидравлическая система встряхивателя питается от гидронасоса 17. Масло к насосам 2 и 17 поступает из масляных баков 3 и 16, на одном из которых установлены два фильтра 4.
Управление механизмами встряхивателя осуществляется от двухсекционного распределителя 1 (рис. 69), одна секция которого связана через дроссели 7 с гидроцилиндрами 6 привода параллелограммного механизма встряхивателя, другая — через программный клапан 2 с гидроцилиндром 4 открытия и закрытия захвата или, благодаря блокировке, с гидромотором 3 вибратора.
При подаче масла через программный клапан 2 оно первоначально через запорный клапан 5 поступает в надпорщневую камеру гидроцилиндра 4. В результате происходит закрытие захвата (зажим ветви). По 1 мере увеличения усилия сжатия штамба подушками захвата давление в системе повышается и,, когда оно становится больше усилия сжатия пружины программного клапана 2, последний автоматически переключается и масло начинает поступать к гидромотору 3 вибратора. Одновременно запорный клапан 5 закрывает надпоршневую камеру гидроцилиндра 4, устраняя возможность раскрытия (разжима) захвата.
Технологический процесс уборки плодов машиной КБП-1 заключается в следующем: тракторист заезжает в междурядье сада по знаку оператора, находящегося на сиденье 2 (рис. 70) останавливает агрегат параллельно рядку и включает ВОМ трактора.
Оператор включает механизм поворота и устанавливает упор 8 улавливателя напротив штамба. Затем, включив механизм поперечного перемещения улавливателя, подводит его до упора в штамб и раскрывает зонт улавливателя. Далее оператор подводит захват к ветви, зажимает ее и включает привод транспортера и вибратора 1. При колебании ветви плоды осыпаются с дерева на улавливающую поверхность. Если они имеют тенденцию к зависанию на полотне, то оператор периодически покачивает улавливающую поверхность с помощью гидроцилиндра.
Опадающие с дерева плоды, скатываясь по приемной поверхности 9, попадают на транспортер 6 и затем в контейнер 3, установленный на вилочных подхватах 5. Для предотвращения сползания контейнера с вилочных подхватов он удерживается специальным ограничителем 4. В момент отрыва плодов и примесей от ленты транспортера они очищаются от легких примесей (листьев, пыли, плодушек, мелких веточек и т. п.) с помощью воздушного потока, создаваемого вентилятором 7.
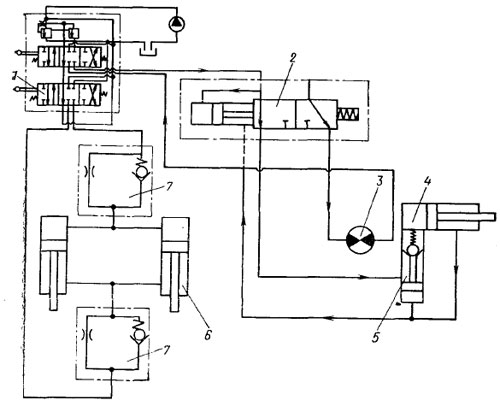
Рис. 69. Схема гидравлической системы стряхивателя машины КБП-1
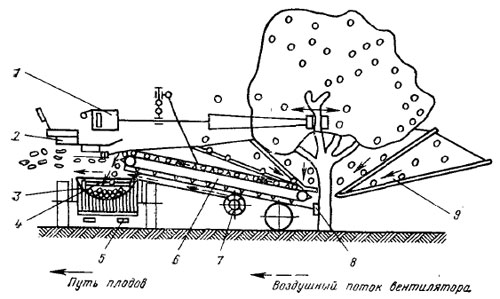
Рис. 70. Схема прохождения плодов в машине КБП-1
После съема плодов с дерева агрегат переезжает к следующему дереву. Операции при отъезде повторяются в обратной последовательности, за исключением того, что улавливатель при этом остается установленным перпендикулярно к направлению движения трактора, т.е. ось транспортера улавливателя и продольная ось трактора будут перпендикулярны друг к другу.
Техническая характеристика машины КБП-1 приведена в табл. 6.
Машина имеет дорожный просвет 190 мм, ширину колеи колес полуприцепа 1680 мм, колес улавливателя 1380 мм, длину выгрузного транспортера 3150 мм. В качестве вибратора применен гидромотор с возвратно-поступательным движением штока, максимальная высота подъема центра захвата от уровня почвы составляет 2600 мм, минимальная 170 мм.
Плоды затариваются в контейнеры размером 1200х800х700 мм.
Плодоуборочную машину с навесным зонтообразным улавливающим устройством изготовляет фирма Бидвелл (США). Машина навешена на трактор класса 1,4 тс. На передней части трактора установлен инерционный штамбовый вибратор, зажимы которого первыми соприкасаются с подлежащим обхвату штамбом. После зажима штамба с помощью гидравлической системы раскрывается зонтообразное улавливающее устройство,, которое в транспортном положении складывается вдоль трактора; при этом максимальная ширина машины в транспортном положении не превышает 3 м, длина 8,8 м. Диаметр зонта в раскрытом состоянии 7,3 м. Высота машины в рабочем положении около 2 м.
Раскрыв зонт, тракторист-оператор, обслуживающий машину, включает инерционный вибратор, частота колебаний которого регулируется в широких пределах, что дает возможность, (визуально) приспособиться к резонансной частоте каждого дерева и добиться эффективной полноты съема плодов. Опадающие с дерева плоды поступают на улавливающую поверхность, откуда они выносятся разгрузочным транспортером в контейнер,, находящийся на навесной системе трактора. Навесная система трактора, оборудованная вилочными подхватами, позволяет наполненный плодами контейнер поставить на землю — это достигается за счет подбора высоты вертикальных участков вилочных подхватов.
По данным европейских стран, в которых работает эта машина, производительность ее находится в пределах 15 – 20 деревьев за час сменного времени.
Развитие конструкций плодоуборочных машин в значительной степени определяется системой возделывания садов. В последнее время во всех странах наметилась тенденция закладки садов уплотненным способом и специальных пальметтных садов с небольшими расстояниями между деревьями в ряду. Плодоуборочные агрегаты с раскрывающимися вокруг дерева улавливающими зонтообразными устройствами не смогут найти применения для уборки плодов в таких садах. Наиболее оптимальным в таких условиях является агрегат, состоящий из двух самоходных прямоугольных улавливающих рам в сочетании с устройствами для колебания деревьев. Однако в настоящее время все страны с развитым садоводством имеют сады с различными схемами посадок, поэтому в ближайшее десятилетие для уборки плодов будут находить применение машины как с зонтообразными, так и с прямоугольными улавливающими устройствами.
В нашей стране рекомендована в производство самоходная плодоуборочная машина ПСМ-55 с прямоугольным улавливающим устройством, разработанная ГСКБ по машинам для садов и виноградников (г. Кишинев), ВИСХОМом им. В. П. Горячкина, ВНИИСом им. И. В. Мичурина и НИЗИСНП.
Машина ПСМ-55 (рис. 71) предназначена для уборки плодов семечковых, косточковых и орехоплодных культур с деревьев диаметром кроны до 7,5 м в садах с шириной междурядья не менее 6 м.
Рис. 71. Общий вид самоходной плодоуборочной машины ПСМ-55
Машина (рис. 72) состоит из двух самоходных секций (левой 6 и правой 18), смонтированных на базе переоборудованного самоходного шасси Т-16М 2, и стряхивателя 8 с серийной Плодоуборочной машины ВСО-25 «Стрела», но имеющего удлиненную на 600 мм штангу и приподнятную на 260 мм раму вибратора.
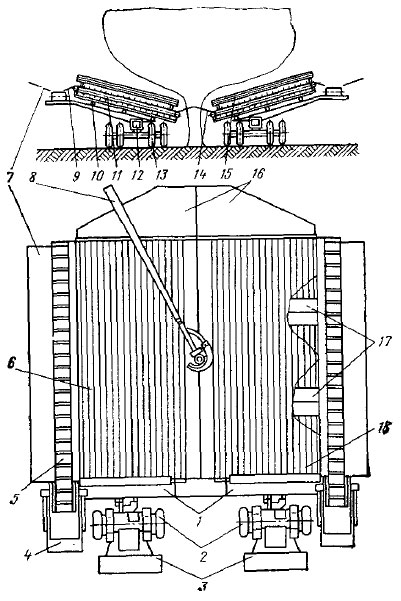
Рис. 72. Схема машины ПСМ-55
Каждая секция состоит из центрального бруса 12, переднего моста 13 с управляемыми колесами, продольного транспортера 5, трех поперечных транспортеров 11, очистительного транспортера (горки), системы 4 загрузки плодов в ящики с площадкой 3 для порожней тары, подвески контейнеров, амортизирующих лент 15, пульта, управления, передних 16 и задних 1 скатных площадок, боковых 7 и промежуточных 9 скатных козырьков, уплотнителей 14 штамбов, двухскатных козырьков 17, роликов 10 для перемещения . улавливающей поверхности и вспомогательных деталей.
Ведущие колеса секции размером 210—508 (ГОСТ 7463—75) заимствованы с переднего моста трактора МТЗ-52.
Центральный брус, изготовленный из трубы, является остовом, на котором крепят основные узлы и детали секции. Одна сторона бруса с помощью болтов и штифтов прикреплена к заднему мосту самоходного шасси, другая — к переднему.
Передний мост (рис. 73) с четырьмя управляемыми колесами 1 размером 135—254 (ГОСТ 7463—75) является опорой секции и служит для изменения направления движения.
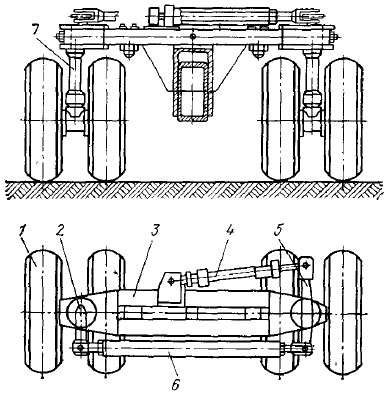
Рис. 73. Передний мост
Управление передними колесами осуществляется с места тракториста при помощи гидроцилиндра 4. Кроме колес и гидроцилиндра в передний мост входят труба 6 и разновеликие рычаги 2 и 5, установленные на раме 3. Колесные пары соединяются с рамой с помощью вилок 7.
Улавливатель имеет сварную раму, на которой установлены три ленточных транспортера 11 (см. рис. 72) с планками. Ленты прикреплены к цепям. Стыки транспортеров разделены двумя двухскатными козырьками 17. Ведущие валы всех транспортеров соединены между собой шарнирами (от карданных передач). На раме улавливателя расположены направляющие, по которым скользят цепи транспортеров. Вся рама установлена на роликах двух верхних и двух нижних опор. Перемещение рамы осуществляется гидроцилиндром, корпус которого закреплен на центральном брусе, а выдвижной шток — на раме.
Привод поперечных транспортеров 11 осуществляется механическими передачами от ВОМ шасси. Длина каждого поперечного транспортера 2670 мм, ширина рабочей части 1050 мм, шаг между планками 380 мм, линейная скорость ленты 0,22 м/с, угол наклона к горизонту 15°.
К передней и задней частям рамы улавливателя прикреплены скатные площадки 16 и 1, являющиеся продолжением улавливающей поверхности. К внутренним сторонам улавливателей шарнирно присоединены откидные щитки 14 (иначе их называют уплотнителями штамбов), которые замыкают улавливающую поверхность вокруг дерева и не дают возможности падать плодам на землю в стыке между секциями.
Над поперечными транспортерами установлены ленточные амортизаторы, предназначенные для уменьшения скорости падающих плодов. Ленточный амортизатор состоит из четырех пар трубчатых поддержек, укрепленных в передней и задней частях рамы улавливателя. Между трубами натянуты амортизирующие ленты в два ряда (в плане — в шахматном порядке). Все щитки, козырьки, двухскатные козырьки, площадки и промежуточные козырьки покрыты поролоном и тонким слоем резины, что предотвращает повреждения падающих на них плодов.
Продольный транспортер — ленточного типа с планками, предназначен для приема плодов с улавливателя и транспортирования их в тару (ящик или контейнер). Лента транспортера прикреплена к цепям. Длина горизонтальной части транспортера 4740 мм, наклонной 2075 мм, ширина рабочей части 460 мм, шаг планок 320 мм, линейная скорость ленты 0,5 м/с. Наклонная часть транспортера установлена под углом 34° к горизонту. Привод транспортера механический от ВОМ шасси.
Продолжением продольного транспортера является разделительный транспортер (горка), шарнирно прикрепленный к наклонной части продольного траспортера и предназначенный для очистки плодов от листьев, мелких веточек и т. п. Разделительный транспортер (рис. 74) представляет собой ленту из грубого материала (материал с большим коэффициентом трения) длиной 600 мм и шириной 550 мм. Лента, двигаясь с линейной скоростью 0,33 м/с навстречу потоку плодов, захватывает листья и другие примеси и выносит их под раму машины, а плоды скатываются в тару. Наклон к горизонту разделительного транспортера может регулироваться в пределах 15 – 30°.
Рис. 74. Разделительный транспортер (горка)
Подвеска контейнера (рис. 75) предназначена для размещения контейнера и обеспечения равномерного заполнения его плодами. Подвеска состоит из основной рамы 5, присоединенной к центральному брусу, поворотной рамы 3, опоры 7 контейнера и распорки 6. Опора контейнера связана с поворотной рамой через две пары роликов 2 и гидроцилиндр 1 для вертикального перемещения подвески. Поворотная рама соединена с основной рамой при помощи осей и гидроцилиндра 4 поворота подвески вместе с контейнером.
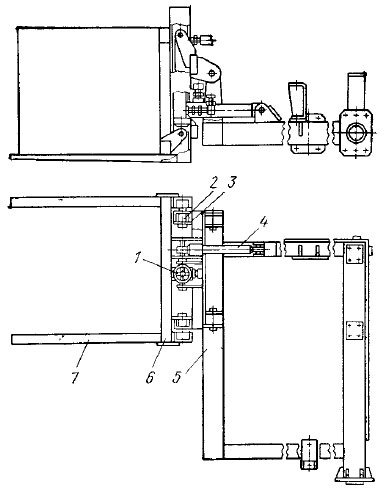
Рис. 75. Подвеска контейнера
В начальный период заполнения контейнера плодами он поднимается с помощью гидроцилиндра 1 в крайнее верхнее положение и поворачивается до предела с помощью гидроцилиндра 4 в сторону разделительного транспортера. По мере заполнения контейнера он опускается на необходимую высоту и разворачивается. При полностью заполненном плодами контейнере подвеска, за счет хода гидроцилиндра 1, может опуститься и поставить контейнер на землю.
На машине ПСМ-55 имеется устройство для укладки плодов в различные по размерам ящики. Устройство состоит из подвижной и неподвижной рам, площадки для ящиков и лотка. Неподвижная рама присоединена с помощью проушин и тяги к поворотной раме подвески контейнера. К неподвижной раме прикреплена подвижная рама с площадкой для ящиков. Последняя может быть переставлена выше или ниже (за счет наличия в системе болтового соединения) в зависимости от размера ящика по высоте. Плоды с разделительного транспортера поступают на лоток, а оттуда — в ящик.
Технологический процесс работы машины ПСМ-55 заключается в следующем: двигаясь по междурядью сада, обе секции останавливаются около дерева так, чтобы его штамб находился в месте вырезов у откидных щитов. Затем секции выдвигают в сторону штамба до момента смыкания. Одновременно с подъездом секций к этому же дереву подъезжает стряхиватель ВСО-25 «Стрела» и захватным устройством захватывает скелетную ветвь или штамб дерева. Водитель каждой секции включает транспортеры улавливателя, а тракторист на стряхивателе включает вибратор. Плоды падают на ленточные амортизаторы, а затем попадают на поперечные транспортеры, которые перемещают их на продольные транспортеры. Продольными транспортерами плоды подаются на разделительные транспортеры и далее в ящики или контейнеры. Заполненные контейнеры за счет опускания подвески устанавливаются на землю. Снятые с машины контейнеры отдельным погрузочным устройством подаются на транспортные средства и вывозятся из междурядья сада. Ящики с плодами вручную снимают с площадки и устанавливают на землю.
Техническая характеристика машины ПСМ-55 приведена в табл. 6.
В Болгарии специалистами отдела механизации Пловдивского научно-исследовательского института садоводства создана плодоуборочная машина «Балкан» в трех модификациях «Балкан-1», «Балкан-2» и «Балкан-3», предназначенных для уборки плодов на техническую переработку.
Машину «Балкан-1» навешивают на тракторы «Болгар» или ТП-45. При небольшом переоборудовании посадочных мест ее можно навесить на тракторы «Беларусь». Обслуживают машину три человека. В машине применен улавливатель зонтообразного типа, раскрытие и закрытие которого осуществляется с помощью гироцилиндра. Площадь улавливающего приспособления около 22 м2, поэтому машину «Балкан-1» можно применять при уборке плодов черешни и слив с небольших по размерам деревьев (диаметр кроны до 4,5 м). В качестве устройства для колебания деревьев применен инерционный вибратор, установленный на специальном кронштейне, изготовленный по типу вибратора с венгерской машины ТФХ. В процессе эксплуатации машин получена производительность до 25 деревьев за час сменного времени. Машины можно применять как на ровных участках, так и на склонах до 18°.
Машину «Балкан-2» применяют для уборки плодов с деревьев, растущих на террасах. Ее навешивают на два трактора: на одном установлен вибратор, аналогичный вибратору машины «Балкан-1», на другом смонтировано улавливающее устройство, полотно которого при уборке расстилают на землю под деревом. Обслуживают машину пять человек. Эксплуатация машин «Балкан-2» показала, что она может обеспечить уборку плодов с 25 деревьев в час сменного времени.
Машина «Балкан-3» (рис. 76) предназначена для уборки плодов косточковых культур с деревьев, растущих на ровных участках или на склонах не более 8°. Она состоит из двух агрегатов с прямоугольными улавливающими поверхностями, общая длина которых равна 6800 мм, ширина 8070 мм, наклон до 30°, полезная площадь улавливателя около 42 м2. Каждая секция машины может быть навешена на тракторы ЮМЗ-6 или МТЗ-5ЛС. В качестве устройства для колебания деревьев применен штамбовый инерционный вибратор с двумя неуравновешенными массами, захват которого может обхватить штамб дерева диаметром до 350 мм. Вибратор установлен на одной секции, на другой смонтирован продольный отводящий транспортер и наклонный поперечный транспортер, подающий плоды в контейнер.
Рис. 76. Плодоуборочная машина «Балкан-3»
Фирма Килби (США) выпускает машину, состоящую из двух самоходных секций. Каждая секция имеет три ведущих ходовых колеса с приводом от автономных гидродвигателей. Улавливающая поверхность пассивного типа, состоит из плоских наклонных щитов, покрытых мягким амортизирующим материалом, и сверху водонепроницаемой тканью. На одной секции установлен штамбовый вибратор для колебания дерева, на другой — продольный выгрузной транспортер с устройством для затаривания плодов в контейнер. Легкие примеси удаляются потоком воздуха на участке отрыва плодов от транспортера, т. е. в момент, когда ворох (плоды и мусор) находится во взвешенном состоянии.
Машина работает в нескольких европейских странах. Производительность машины на уборке слив в условиях Венгрии составила 50 деревьев за час при обслуживании машины четырьмя рабочими — двумя водителями и двумя вспомогательными рабочими. Машина может убирать плоды с деревьев, диаметр кроны которых не 1 более 6 м, высота 5,0 – 7,5 м, высота штамба не менее 60 см с расположением концов ветвей не ниже 120 см от земли. При этом вибратор захватывает дерево только один раз за штамб и может сообщать ему колебания с частотой 1200 – 2100 циклов в минуту (в зависимости от убираемого сорта плодов).
Самоходные плодоуборочные машины фирм Голд и Перри. Харвестер (США) описаны в работе. Техническая характеристика машин приведена в табл. 6.
Машина фирмы Голд работает на уборке миндаля, показывая вполне удовлетворительные результаты по полноте съема и улавливания плодов.
Машина модели С фирмы Перри Харвестер испытывалась на уборке различных культур. В результате испытаний установлено, что полнота съема плодов с дерева составляет 90 – 92%, полнота улавливания в пределах 95 – 96%, потери плодов на землю на стыке секций 5 – 6%, повреждения плодов 8 – 9%, повреждения деревьев в месте захвата штамбовым вибратором в среднем 11 – 14%. Последнее может быть объяснено плохой обзорностью штамба дерева из-за его небольшой высоты и свисающих ветвей.
Качество плодов убранных машиной оказалось вполне удовлетворительным. Вишни и черешни продавались в свежем виде и использовались для приготовления компотов. Яблоки реализовывались в свежем виде и сдавались на техническую переработку. При этом первым сортом на техническую переработку принималось 85 – 90% убранных машиной плодов.
Испытания показали хорошую маневренность, проходимость и производительность машины. При уборке вишни достигнута производительность 40 деревьев в час, черешни — 27, яблок — 33, слив — 23 дерева в час. При уборке отдельных сортов яблок достигнута производительность 47 деревьев в час.
Фирма Перри Харвестер, кроме плодоуборочной машины модели С, изготовляет еще две упрощенные плодоуборочные машины моделей FE и ЕЕ для уборки плодов на техническую переработку.
Машина модели FE состоит из двух самоходных секций: на первой расположен продольный и наклонный транспортеры, предназначенные для транспортирования плодов с улавливающей поверхности и загрузки их в контейнеры; на второй установлен штамбовый вибратор, аналогичный вибратору машины модели С.
Каждая самоходная секция установлена на три ходовых колеса — два задних колеса образуют ведущий мост, переднее колесо является управляемым (возможен поворот колеса на 180°) и одновременно ведущим. Привод всех колес индивидуальный от героторных гидродвигателей.
Улавливающая поверхность состоит из щитов, наклон к горизонту которых может изменяться с помощью гироцилиндров. Щиты покрыты эластичным материалом толщиной 38 мм, который, в свою очередь, покрыт влагостойкой пленкой.
Машина модели ЕЕ является промежуточной между машинами моделей С и FE. Обе ее самоходные секции имеют устройства для транспортирования и затаривания плодов.
Основным преимуществом модели ЕЕ является малый дорожный просвет горизонтальной части улавливателя, что дает возможность применять эту машину в садах, деревья в которых имеют небольшую высоту штамба, в садах с полукарликовыми деревьями и с уплотненной посадкой.
В качестве устройств для колебания деревьев на машине могут быть применены как штамбовые вибраторы, так и турельные стряхиватели.
Фирма Перри Харвестер по отдельным заказам изготовляет самоходную машину модели G, снабженную полотном, которое с помощью простого приспособления расстилается (сматывается) под деревом, и саморазгружающимся поддоном. Колебания деревьев в основном осуществляют штамбовым вибратором, однако, при необходимости, машина может быть оборудована турельным стряхивателем.
При работе машины плоды падают на заранее уложенное под деревом полотно, и при скручивании последнего поступают на саморазгружающийся поддон. Поднимая один конец поддона, плоды направляют на транспортер, который загружает их в контейнер. Эта машина проще и дешевле только что описанных, но при ее эксплуатации требуются значительные затраты ручного труда.
Плодоуборочная машина фирмы Фрайди трактор состоит из двух самоходных секций, системы транспортеров, для загрузки контейнеров плодами, турельных стряхивателей на каждой секции и штамбового вибратора на одной секции и других вспомогательных узлов.
На машине установлены два двигателя внутреннего сгорания: на секции только с турельным стряхивателем — двигатель мощностью 30 л. с, на секции со штамбовым вибратором и турельным стряхивателем — двигатель мощностью 66 л. с.
Ходовая система каждой секции состоит из четырех колес, объединенных в два управляемых моста. Привод ходовой системы — гидромеханический.
Улавливающая поверхность обеих секций покрыта эластичным материалом толщиной 50 мм, сверху которого положена водоотталкивающая пленка. Над этой поверхностью устанавливают амортизирующие ленты, гасящие скорость падения плодов.
Система продольных и поперечных транспортеров обеспечивает загрузку плодов в контейнеры. Очистка плодов от легких примесей осуществляется воздушным потоком, создаваемым специальным вентилятором.
Одной из особенностей штамбового вибратора машины фирмы Фрайди трактор является возможность раздвижения губок захватного устройства на 1200 мм, что облегчает ориентацию секции относительно подлежащего обхвату штамба, т. е. увеличивает маневренность всей плодоуборочной машины. Другой особенностью является оборудование вибратора автоматическим приспособлением для подачи специальной жидкой смазки к коре штамба дерева. Это предотвращает повреждение коры при зажиме губками захвата. Емкость для жидкой смазки расположена на подвижной части захвата и вмещает количество жидкости (около 32 л), достаточное для смазки коры 1000 деревьев.
Плодоуборочная машина фирмы SSP представляет собой автономное энергетическое средство, снабженное складывающимся полотняным улавливающим устройством в виде перевернутого зонта (в развернутом виде зонт имеет диаметр 9 м) и штамбовым вибратором с регулируемой частотой колебаний. Привод всех узлов и ходовой системы машины — гидравлический.
Машина оборудована устройствами для транспортирования, затаривания и очистки плодов от легких примесей с помощью воздушного потока, создаваемого вентилятором. На ней предусмотрена площадка для транспортирования семи пустых контейнеров.
Плодоуборочная машина фирмы SSP предназначена для уборки персиков, абрикосов, вишни, чернослива, сливы, олив, миндаля, грецкого ореха и фисташки.
Фирма ОМС выпускает самоходную на трех колесах машину «Катхал III», аналогичную машине фирмы SSP с зонтообразным улавливающим устройством диаметром 6,6 м в развернутом виде и штамбовым вибратором. Машина имеет длину 8100 мм; и радиус поворота по крайней точке не более 6 м. Шины высокой проходимости позволяют работать машине в тяжелых условиях в саду.
Фирма Халсей изготовляет самоходную плодоуборочную машину «Хустлер», аналогичную машине модели FE фирмы Перри Харвестер. В отличие от машины модели FE данная машина имеет четырехколесное шасси с индивидуальным приводом каждого колеса. Одна секция машины оборудована штамбовым вибратором с захватом в виде ( ножниц, другая — системой транспортирования и затаривания' плодов. Направление потока плодов на машине «Хустлер» не изменяется, в то время как на машине модели FE плоды с продольного транспортера поступают на наклонный транспортер, расположенный по отношению к первому под углом 90°. Продольный транспортер машины «Хустлер» выполнен с наклонной частью, под которую устанавливают контейнер. В качестве улавливающей поверхности применены щиты общей площадью 7,3х7,3 м, покрытые эластичным материалом. При необходимости; за счет удлинителей, поверхность улавливания может быть увеличена до 8,53x8,53 м. Управление машины, за исключением включения передач (12 переднего хода и 4 заднего), гидравлическое.
Фирма Халсей изготовляет также машину модели 300, отличающуюся от рассмотренной тем, что имеет трехколесное шасси с приводом задней двухколесной оси. Остальные показатели машины такие же, как и машины «Хустлер».
Кроме того фирма Халсей изготовляет штамбовые вибраторы трех типов: вибраторы двух типов используют на рассмотренных здесь машинах, вибраторы третьего типа — на тракторе, для колебания деревьев при съеме плодов на землю.
Штамбовые вибраторы на автономных тракторах для колебания различных по величине деревьев выпускают и ряд других фирм США. Так, фирма Килби выпускает штамбовые вибраторы двух типоразмеров, монтируемые на четырехколесном шасси с шестицилиндровым двигателем V8. Оба вибратора могут быть оснащены захватами в виде ножниц или струбцины и подвешены спереди энергетического средства.
Стандартный вибратор может захватывать деревья на высоте 5,18 м, вибратор модели «Делюкс» — на высоте 7,0 м.
Фирма FMC изготовляет штамбовые вибраторы трех моделей одинаковой конструкции, различающихся лишь захватными приспособлениями. Вибратор модели HVSS имеет захват в виде ножниц, моделей HVSM и HVS — струбцинного типа с величиной открытия соответственно 508 и 914 мм.
Масса вибратора, участвующая в колебаниях, может регулироваться за счет свинца, загружаемого в головку вибратора.
Вибраторы всех трех моделей можно навешивать на штангу длиной 2,4 или 3,6 м, которую при транспортировке можно складывать.
Вибратор со штангой монтируют на четырехколесное энергетическое средство с индивидуальным гидроприводом колес. На машине установлен насос подачей 245 л/мин и масляный бак вместимостью 363 л. Шасси имеет четыре передние и одну заднюю скорости.
Вишня занимает особое место среди других плодов. Она не может храниться длительное время, ее трудно транспортировать на далекие расстояния, затраты труда на уборку достигают в отдельных странах до 80% общих затрат труда по возделыванию этой ценной культуры.
Трудоемкость ручного сбора вишни в 6 – 8 раз выше трудоемкости сбора яблок, персиков и груш. Так, в США на уборку вишни затрачивается 450 – 1000 чел.-ч на 1 га, у нас — 600 – 700 чел. — ч на 1 га. В других странах затраты труда примерно такие же.
Во всех странах подавляющая часть собранной вишни направляется на переработку. В среднем перерабатывается не менее 70% урожая.
Учитывая короткие агротехнические сроки, темпы ручного сбора вишни не могут удовлетворять садоводческие хозяйства. Кроме того, огромны потери урожая от птиц. Чем больше растянут срок уборки, тем большие потери плодов от птиц. Так, в Центральной и Западной Европе потери от птиц составляют 40% и более всего биологического урожая.
Для защиты урожая от птиц в Европе испытывали различного типа птицеловки и автоматические карбидные пистолеты.
Птицеловки оказались малоэффективными, а к выстрелам птицы быстро привыкали. Попытки применить электроакустические приборы для отпугивания птиц также не дали положительных результатов. В некоторых странах применяют для защиты урожая от птиц нейлоновые (Франция, США, Новая Зеландия и др.) и полиэтиленовые (Япония) сети шириной 17 м. В этом случае в вишневом саду ставят столбы с проволокой, сверху которой натягивают сети. Операция эта трудоемкая и дорогостоящая — на 1 га расходуют сети стоимостью 500 долларов, а также требуется работа 5 рабочих в течение двух дней. Из-за неудобства установки и дороговизны широкого применения сети не находят.
С целью сокращения сроков уборки, повышения производительности труда и уменьшения потерь от птиц во многих странах, широко культивирующих вишню, изыскиваются новые способы ее уборки.
Ручные устройства для уборки урожая вишни не нашли широкого применения из-за большой массы вибратора, необходимости переборки (очистки) снятых плодов с целью удаления посторонних примесей (листьев, веточек, сухих плодов и т. п.) и неудобства затаривания плодов.
Дальнейшим развитием технических средств для уборки вишни явилось создание вибрационных машин. Уборка урожая с древовидных вишен может осуществляться плодоуборочной машиной ВСО-25 «Стрела» и другими подобными машинами.
Серьезной проблемой при машинной уборке вишни является ее дальнейшее использование. В некоторых странах проверялась и уже находит применение технология уборки машиной с загрузкой вишни (для последующей транспортировки) в емкости с водой, что улучшает товарный вид плодов, очищает их от легких примесей и дает возможность удлинить срок хранения до переработки. Температура воды в емкости должна быть в пределах от +10 до 15°. Для ее поддержания в емкость иногда закладывают лед.
Вишню, транспортируемую в емкостях с водой или с раствором двуокиси серы, трудно продавать по весу. В США для этих целей разработан метод объемного измерения ягод в растворе.
Для улучшения товарного вида плодов и избежания ожогов в отдельных штатах США убирают вишню машиной в более прохладное время суток, в том числе ночью.
При машинной уборке получают вишню с плодоножкой и без нее, поэтому возникла необходимость изыскать способ выделения ягод с плодоножками. В США применяют сепарацию вишни по различию скорости опускания в жидкой среде ягод с плодоножками и без них и по различной ориентации под действием центробежных сил. Наличие плодоножки приводит к некоторому увеличению скорости опускания ягод в водном растворе соли, и этот признак положен в основу гидродинамической сепарации, несмотря на определенный разброс конечных скоростей из-за непостоянства формы ягод. Силы, воздействующие на ягоды на обрезиненном диске, совершающем планетарное движение, вызывают движение ягод по спирали с раскачиванием. Однако для каждого сорта вишни нужно найти частоты, отвечающие равному углу отклонения плодоножек от оси вращения, после чего возможна простейшая механическая сепарация. На некоторых плодоперерабатывающих заводах США сортировка плодов с плодоножками и без них выполняется на электронных сортировальных машинах производительностью до 1000 кг/ч.
Особое место среди плодоуборочных машин занимают машины для уборки вишни с полукустовидных деревьев. Наиболее распространенными сортами этой вишни являются: Любская, Владимирская и Жуковская.
Деревья полукустовидной вишни этих сортов имеют небольшой высоты штамб (22 – 38 см), диаметр его на половине высоты равен 7,0 – 8,5 см, высота деревьев составляет 2,3 – 2,8 м с диаметром кроны поперек ряда 3,0 – 3,2 и вдоль ряда 3,0 – 3,1 м. Одной из главных отличительных особенностей полукустовидной вишни является то, что от маленького штамба отходит 6 – 10 скелетных ветвей. Схемы посадки деревьев 5х3, 5х2,5 и даже 5x2 м.
Изучение отечественного и зарубежного опыта по уборке мелких косточковых плодов (вишни, черешни, мелкоплодной: сливы, мирабели, морели, оливы и др.) позволило установить, что для уборки вишни с полукустовидных деревьев должна быть создана специальная машина, способная захватывать дерево один раз за штамб для ускорения процееса съема плодов и,, следовательно, увеличения производительности труда.
При решении этой проблемы теоретическим путем с последующим подтверждением скоростной киносъемкой были определены амплитудно-частотные режимы работы вибратора, обеспечивающие необходимые колебания ветвей для съема 98% и более плодов.
Были проведены экспериментальные исследования различных материалов для улавливающей поверхности. Основные требования к подобному материалу заключаются в том, чтобы он не вытягивался, был прочным, легким, влагостойким и легко, моющимся. Испытанию были подвергнуты материалы более десяти типов (брезент, парусина, палаточное полотно, материал, для плащей и т. п.). Все эти материалы оказались неподходящими из-за неудовлетворительной влагостойкости, что приводило при намокании к образованию мешков, в которых затем: скапливались плоды.
Наилучшим материалом, отвечающим почти всем требованиям, можно считать мелиоративную ткань, которая и была рекомендована для изготовления улавливающей поверхности проектируемой машины.
Не менее важным вопросом при создании машины явилось, определение расчетным путем необходимых скоростей воздушного потока для очистки плодов от посторонних легких примесей.
Используя теоретические исследования, ГСКБ по машинам для садов и виноградников в г. Кишиневе, ВИСХОМ. им. В. П. Горячкина и ВНИИС им. И. В. Мичурина разработали машину ВУМ-15 (рис. 77) для уборки плодов с полукустовидных деревьев.
Машина ВУМ-15 (рис. 78) навешена на самоходное шасси Т-16М (поз. 10). Основными узлами машины являются рама, вибратор 3, транспортер 5, навесной и приставной улавливатели, устройство 6 для очистки плодов от легких примесей и вспомогательные узлы.
Рис. 77. Машина ВУМ-15 для уборки вишни с полукустовидных деревьев
Рама состоит из двух частей: передней и задней, — предназначенных для крепления всех узлов машины.
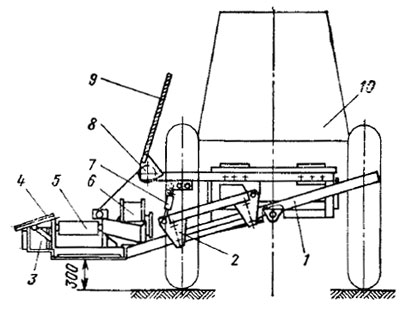
Рис. 78. Схема машины ВУМ-15 (вид сзади) без приставного улавливателя
Вибратор (рис. 79), предназначенный для колебания штампа дерева, имеет основание 9, перемещающееся в опорах 10 установленных на раме транспортера. К скобе 3 жестко по ь хреплены корпуса гидроцилиндров 1, выдвижные штоки которых соединены с зажимами 2 штамба, выполненными из резиновых труб. Основание вибратора жестко соединено с корпусом 6 кривошипно-шатунного механизма, внутри которого смонтирован коленчатый вал 5. Шатун 4 шарнирно соединен с ушком корпуса гидроцилиндра 1. Коленчатый вал приводится во вращение через двухрядную втулочно-роликовую цепь 8 и звездочку 7 промежуточного вала, который, в свою очередь, приводится во вращение от ВОМ шасси через карданную передачу. Возврат зажимного устройства в среднее положение (раскрытое состояние) осуществляется пружинами 12, установленными на направляющей 11.
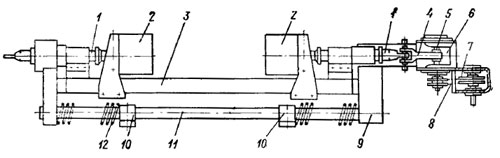
Рис. 79. Вибратор
Транспортер 5 (см. рис. 78) установлен на раме, соединенной с направляющими 1, которые, двигаясь по блокам роликов 2, обеспечивают подведение транспортера с козырьком 4 к дереву и отводят его от дерева с помощью гидроцилиндра, закрепленного на задней раме. Один конец блока роликов прикреплен шарнирно к раме, другой — также шарнирно к поддерживающей стяжке 7 со специальной гайкой. Подобное крепление позволяет изменять угол наклона направляющих.
Очистка плодов от легких примесей осуществляется воздушным потоком, создаваемым вентилятором 6 (см. рис. 78), установленным на транспортере. Вентилятор приводится в действие от гидромотора через цепную передачу.
С целью исключения падения плодов на самоходное шасси 10 на опорах барабана 8 для наматывания полотна навесного улавливателя установлен экран 9, отражающий падающие плоды.
Технологический процесс, выполняемый машиной ВУМ-15, следующий. Агрегат въезжает в междурядье и останавливается у дерева таким образом, чтобы штамб находился против зажимов вибратора. Тракторист включает гидроцилиндр выдвижения транспортера и последний, надвигаясь на дерево, упирается продольной подушкой захвата в штамб. Одновременно с выдвижением транспортера разматывается полотно навесного улавливателя, образующего половину приемной поверхности. Двое рабочих в соседнем междурядье подносят к этому же дереву приставной улавливатель 1 (см. рис. 77). Затем тракторист при помощи гидроцилиндров зажимает штамб подушками вибратора. При этой операции, также с помощью гидроцилиндрз, устанавливается в горизонтальное положение козырек с вырезом под штамб дерева. На козырек помещают один край приставного улавливателя. Таким образом, под деревом получается замкнутая приемная поверхность. Далее включают в работу вибратор и транспортер. Опадающие с колеблющегося дерева плоды попадают на улавливащую поверхность, скатываются с щее на транспортер и подаются последним в ящики, одновременно очищаясь от легких примесей в момент отрыва от ленты транспортера.
Рекомендуется проводить колебания дерева в 2 – 3 приема, повышая частоту колебаний при каждом последующем приема за счет частоты вращения двигателя шасси. Такой способ обеспечивает минимальный разброс плодов за пределы улавливающей поверхности и передает колебания всем участкам ветви, что позволяет снять с дерева максимальное количество плодов.
После съема всех плодов выключают вибратор, открывают зажимы захватного устройства и после затаривания всех плодов останавливают транспортер. Затем переводят навесной улавливатель в транспортное положение и машина переезжает к очередному, подлежащему обработке дереву. Двое рабочих в соседнем междурядье переносят приставной улавливатель к тому же дереву и весь процесс работы повторяется в рассмотренной здесь последовательности.
Техническая характеристика машины ВУМ-15 приведена в табл. 6. Дополнительно укажем, что масса приставного улавливателя, переносимого вручную, составляет 33 кг, скорость ленты выгрузного транспортера равна 45 м/мин, скорость воздушного потока, создаваемого центробежным вентилятором Ц-13-50 № 2 для очистки плодов от легких примесей, составляет 9,4 м/с.
Особенности развития кустов фундука, заключающиеся з том, что в одном кусте расположено более 10 стволиков, привели к необходимости изыскания захватных устройств для обеспечения одновременного колебания всех стволиков.
Плоды фундука убирают сейчас вручную, на что расходуется до 54% общих затрат труда на возделывание фундука.
В течение последних лет Азербайджанским НИИМЭСХ, ВИСХОМом и ГСКБ по машинам для садов и виноградников (г. Кишинев) ведутся работы по изысканию средств механизации уборки фундука.
Макетный образец первой фундукоуборочной машины был выполнен на базе серийной плодоуборочной машины ВСО-25 «Стрела».
Оригинальным узлом машины является трехъячеистый захват (рис. 80), имеющий две шарнирно закрепленные на штанге створки, выполненные в виде гребенки. При этом для улучшения ввода гребенок в куст и более полного захвата отдельных стволиков зубья одной гребенки выполнены входящими с зазором в пазы другой и изогнуты по радиусам, соответствующим их удалению от шарнира крепления гребенок. Основным недостатком данного захвата является трудность разделения стволиков по ячейкам. При работе в одну ячейку попадает несколько стволиков, что ухудшает полноту съема плодов.
Таблица 6
Техническая характеристика вибрационных плодоуборочных машин
| Показатели |
ВСО-25 «Стрела» |
ТФХ и КГЕ (Венгрия) |
МПУ-1 |
КПБ-1 (Болгария) |
ПСМ-55 |
ВУМ-15 |
Фирмы Голд (США) |
Машины фирмы Перри Харвестер (США) | |
| с турельным стряхивателем |
со штамбовым вибратором | ||||||||
| Ширина междурядий, м |
6 и более |
6 и более | 5 и более | 6 и более | 6 и более | 4 и более | 6 и более | 6 и более | 7 – 8 |
| Марка или класс трактора (гс) для агрегатирования |
ДТ-20 |
1,4 |
Самоходная на базе шасси Т-16М |
1,4 |
Самоходная на базе двух шасси Т-16М |
Самоходная на базе шасси Т-16М | Самоходная с общей мощностью двигателей 60 л.с. |
Самоходная с общей мощностью двигателей 214 л.с. | |
| Привод рабочих органов |
От ВОМ трактора |
Гидравлический |
Гидромеханический |
От ВОМ шасси | Гидравлический | ||||
| Производительность деревьев в час чистой работы |
20 – 25 |
20 – 25 |
25 |
20 –25 |
до 47 |
до 49 |
17 |
23 – 27 |
23 – 27 |
| Диаметр обхватываемой ветви, мм |
40 – 140 |
60 – 150 |
до 200 |
40 – 160 | 40 – 140 |
20 – 130 |
до 160 |
50– 100 |
154 – 400 |
| Частота колебаний вибратора, цикл/мин |
900 – 1300 |
1000 |
950 |
1200 – 1500 |
900 – 1300 |
1200 |
1000 – 1100 |
300 – 720 |
240 – 780 |
| Амплитуда колебаний, мм |
18 |
35 – 45 |
36 |
15 – 20 |
18 |
24 |
30 |
20 – 30 |
до 70 |
| Площадь улавливающей поверхности, м2 |
25,5 |
30 |
32 |
32,6 |
56 |
15,9 |
60 |
96 |
96 |
| Мощность потребляемая на привод рабочих органов, л.с. |
9 – 11 |
14 |
11,5 |
36,4 |
36, в том числе на привод вибратора 9 – 11 |
10,7 |
18,8 на привод вибратора |
19,3 на привод вибратора |
43,3 на привод вибратора |
| Количество обслуживающего персонала |
7 |
6 |
3 |
3 – 4 |
5 – 6 |
3– 4 |
4 |
6 |
4 |
| Габаритные размеры в рабочем положении, мм: | |||||||||
| длина |
5400 |
6350 |
8600 |
9810 |
9150 |
4750 |
9510 |
Около 11800 | |
| ширина |
1300 |
1940 |
5960 |
7650 |
8700 |
9740 |
4870 |
Около 9600 | |
| высота |
1530 |
1200 |
2070 |
2500 |
2200 |
1450 |
2210 |
2100 | |
| Общая масса, кг |
468 |
685 |
2824 |
1826 |
7540 |
850 |
4875 |
Около 13000 | |
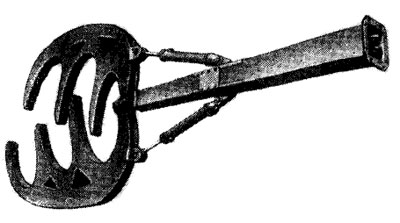
Рис. 80. Трехъячеистый захват для колебания кустов фундука (эластичное покрытие зубьев не показано)
Дальнейшим развитием подобных захватных устройств явилось создание многоячеистого захвата. В этом захвате значительно лучше распределялись стволики фундукового куста в ячейках, что давало возможность снимать с куста до 87% плодов.
Оба захвата устанавливали на вибрирующий шток машины ВСО-25 «Стрела». Для исключения повреждений стволиков захваты покрывали двумя слоями пористой резины толщиной по12 мм и сверху брезентом.
Эксплуатация машины ВСО-25 «Стрела» с ячеистыми захватами на уборке фундука показала, что для обеспечения полноты съема плодов до 95% необходимо иметь частоту колебаний около 12 Гц и амплитуду около 55 мм, а для обеспечения полноты съема плодов 99% частота колебаний должна превышать 16 Гц. При возможных режимах работы вибратора машины ВСО-25 «Стрела» (частота около 14 Гц, амплитуда 18 мм) полнота съема плодов не превышает 81%.
В связи с недостаточной полнотой съема плодов машиной ВСО-25, а также из-за трудности захвата ячеистым устройством всего фундукового куста и большой массы захвата был создан гребенчатый захват.
Захват (рис. 81) состоит из двух секций 7 гребнеобразной формы. Каждая секция расположена на опоре 2 и имеет автономный эксцентриковый вибратор 9, сидящий на валу 10, установленном в подшипниках скольжения 4. Включение вибратора осуществляется через специальную муфту 11. Вибратор закрыт кожухом 12. Гребнеобразные секции захвата вводятся в куст при вертикальном положении гребенок 8, рабочая поверхность которых покрыта эластичным материалом. Затем с помощью специальных тяг 6 и поводков 3 гребенки поворачиваются в кусте на 90°, зажимая отдельные стволы между зубьями и плоской частью (стержнем) соседней гребенки.
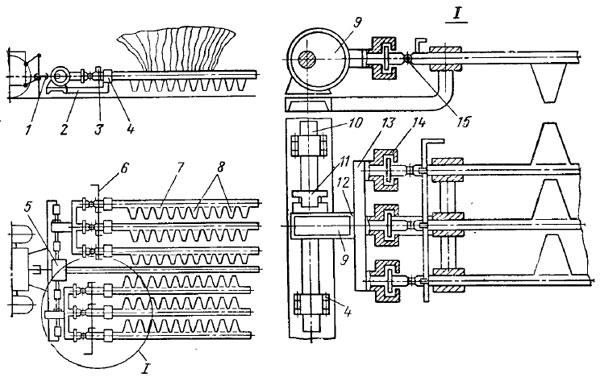
Рис. 81. Схема гребенчатого захвата фундукоуборочной машины
Поворот секций гребенок осуществляется с помощью двуплечего рычага 13, благодаря наличию поворотного подшипника 14 и шарового сочленения 15. Привод захватов осуществляется от ВОМ трактора класса 1,4 тс через карданную передачу 1 и конический редуктор 5. При этом вращение валов предусмотрено в разные стороны, что до определенной степени уравновешивает работу механизма захвата. После захвата куста и его колебания отключается ВОМ трактора, разворачиваются гребенки и трактор отъезжает от дерева.
Гребенчатый захват вполне удовлетворительно обхватывает весь фундуковый куст и при частоте колебаний вибратора 12 Гц и амплитуде 55 мм обеспечивает съем плодов с деревьев в пределах 93 – 95%. Повреждения плодов при любом способе уборки отсутствуют.
Указанные устройства для колебания фундуктовых кустов работали в сочетании с улавливающими устройствами самого простого типа — расстилали под деревом брезент или применяли переносимое вручную улавливающее приспособление машины ВСО-25 «Стрела».
В г. Кишинев, ВИСХОМ и АзНИИМЭСХ начали разработку мобильной машины для уборки фундука. В качестве рабочего органа для колебания кустов на машине предполагается применить гребенчатый вибратор, навешиваемый на трактор класса 1,4 тс. На этом же тракторе будет смонтировано улавливающее устройство с автоматическим раскрытием (складыванием) полотен вокруг дерева и устройство для затаривания снятых с дерева плодов в ящики.
Для уборки отдельных культур (например, грецких opexoв с высокорослых деревьев, яблок на техническую переработку и др.) находят применение тросовые плодоуборочные машины, в которых используются вибраторы кривошипно-шатунного типа и кулачковые.
Принципиальная схема тросовой машины (вернее устройства для колебания ветвей) приведена на рис. 82. На тракторе 1 устанавливают вибратор 2. К вибратору крепят гибкий трос 3, второй конец которого соединяют с крюком 4, покрытым эластичным материалом.
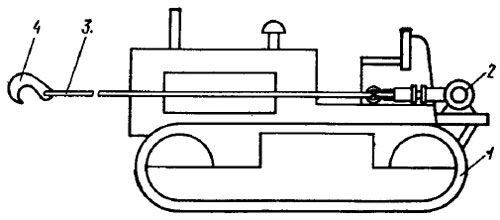
Рис. 82. Принципиальная схема тросовой машины для уборки плодов
Технологический процесс работы машины заключается в следующем: крюк накидывают (обычно вручную) на скелетную ветвь или на ствол дерева. На высокие деревья крюк поднимают с помощью шеста или специального приспособления. Затем натягивают трос путем отъезда трактора или применения специального приспособления и включают в работу вибратор. При использовании таких устройств для колебания деревьев (ветвей) плоды, как правило, падают на землю, а затем их подбирают вручную или с помощью подборщиков.
Достоинствами тросовых машин являются простота конструкции, относительно небольшие затраты мощности на колебания ветвей, возможность уборки плодов с деревьев высотой до 25 м.
Тросовые машины имеют некоторые недостатки. В частности трудно набрасывать крюк на высокорасположенные ветви. Для этого приходится изготовлять шест длиной 5 – 6 м и монтировать на трактор подъемную площадку, что усложняет конструкцию машины.
При уборке урожая с высокорослых деревьев плоды падают на землю. В связи с этим появляется необходимость планировать рельеф под деревьями и прикатывать почву перед уборкой чтобы легче было подобрать плоды под деревьями вручную или полнее подобрать при помощи специальных подбородных машин. При задерненных междурядьях появляется необходимость в подстрижке травы косилками газонного типа, обеспечивающими низкий срез.
Макетные образцы тросовых машин для уборки грецких орехов с деревьев высотой 20 м и диаметром кроны 15 – 20 м испытывали в условиях Дагестана.
Тросовая машина конструкции Дагестанской опытной станции плодово-ягодных культур состоит из гусеничного трактора Т-50В и кулачкового вибратора с гибким тросом и крюком.
На тракторе установлена подъемная стрела, которая позволяет оператору с помощью шеста длиной 5 м поднимать крюк на высоту до 13,5 м. Крепление крюка на такой высоте обеспечивает колебание скелетных ветвей (диаметром в месте захвата 190 – 200 мм) и уборку орехов с деревьев высотой 18 – 20 м. Подъемная стрела имеет самоустанавливающуюся площадку для оператора. Для повышения производительности труда оператор при одном подъеме стрелы навешивал сразу три крюка на ветви. При этом длина тросов была 12; 14 и 18 м, я их диаметры соответственно 6; 8 и 12 мм. Тросы при помощи быстросъемного устройства поочередно соединяли с вибратором. Оптимальные режимы колебаний вибратора: частота 3 – 7 Гц, амплитуда 30 мм. Амплитуду колебаний вибратора можно изменять сменой кулачка, а частоту — сменой шкива.
Применение тросовых машин для уборки различных плодов (грецкие орехи, абрикосы, черешня) позволяет увеличить производительность труда в 4 раза по сравнению с уборкой вручную и снизить затраты труда при этом в 2 раза. Полнота съема абрикосов получена до 90%, черешни – до 94%, Грецких орехов – до 93%.
Для уборки орехов с высокорослых деревьев в США находят применение тросовые машины с вибраторами кривошипно-шатунного типа. Плоды трясут на землю и затем подбирают вручную или с помощью специальных подборщиков.
Французским национальным институтом сельскохозяйственной техники создана тросовая машина для уборки сливы, мирабели и абрикосов. Один конец троса связан с кривошипно-шатунным механизмом, на втором конце через пружину закреплен обрезиненный крюк. Привод кривошипно-шатунного механизма осуществляется от ВОМ трактора через вариатор позволяющий регулировать частоту колебаний в пределах 100 – 600 циклов в минуту.
По данным французских ученых, это устройство для колебания деревьев хорошо сочетается с зонтообразным улавливающим устройством, оборудованным вентилятором для пневмосепарации листьев и мелкого сора.
